Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Базовые механизмы управления шагающим роботом
При движении в сложных условиях машины с шагающими движителями могут быть более эффективными в сравнении с традиционными транспортными средствами. Использование шагающего способа передвижения дает качественный рост ряда основных показателей транспортных машин по сравнению с колесными и гусеничными движителями. Имеют место принципиально более высокие возможности по адаптации к опорной поверхности и профильная проходимость, высокая маневренность, допускающая перемещение машины в произвольном направлении и повороты на месте, возможность работы на слабых грунтах, возможность управления опорными реакциями и стабилизации положения корпуса при движении.
Природа не создала колеса просто потому, что система рычагов более приспособлена для передвижения по естественному грунту. Этому способствуют свойства опорно-двигательного аппарата шагающего движителя: дискретность колеи и наличие нерабочего пространства ног. Под дискретностью колеи понимают прерывистость контакта движителя, в данном случае с поверхностью передвижения. Под рабочим пространством ног понимается пространство, окружающее корпус, точки которого достижимы для опорного элемента шагающего движителя. Эти свойства шагающего движителя позволяют предполагать высокую опорную и профильную проходимость для искусственных шагающих средств передвижения. Кроме сильно пересеченной местности, для обычного транспорта непроходимой является и среда, приспособленная для обитания человека: здания с узкими проходами, резкими поворотами, лестничными маршами.
Шагающие машины могут успешно использоваться для транспортировки грузов, в том числе и негабаритных, в условиях бездорожья. Также возможно их использование для осуществления различных технологических операций в нефте- и газодобывающих отраслях (в условиях тундры, пустыни, леса и др. сложных условиях). Шагающие машины, благодаря дискретному и близкому к статическому взаимодействию стоп с грунтом, практически не разрушают экологически ранимый почвенный покров. Предполагается использование шагающих робототехнических комплексов для аварийно-спасательных работ в экстремальных условиях и ликвидации последствий природных и техногенных катастроф. Проведение ремонтно-восстановительных работ на очистных сооружениях промышленных предприятий. Возможно использование мобильных робототехнических систем с шагающими движителями в военных целях. Шагающие машины могут оказаться эффективными при ликвидации последствий военных действий, например, для поиска и разминирования мин. Известны разработки шагающих роботов для исследования поверхности планет. Существуют шагающие роботы, для передвижения внутри труб и для вертикального перемещения. В последнее время также становятся популярными шагающие роботы для домашнего сервиса, отдыха, медицины.
В настоящее время разработки шагающих машин ведутся во всех развитых странах. Существует несколько полномасштабных образцов (массой более 1 т) пригодных для реальных транспортно-технологических операций (рис 1). К ним, в частности, относятся шагающая машина ASV (США), предназначенная для передвижения по пересеченной местности, мобильный робот Ambler (США), спроектированный по заказу NASA, шагающий робот MECANT, разработанный в Хельсинкском технологическом университете, а также финская шагающая машина фирмы Plustech, предназначенная для лесного хозяйства. [Чернышев, 2008]
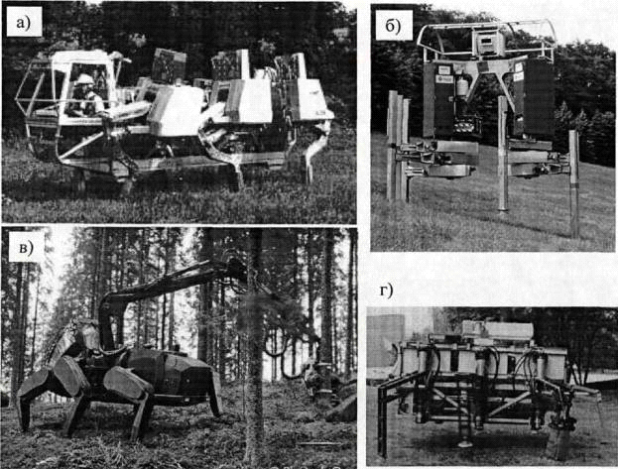
Рис. 1. Шагающие машины «тяжелой» весовой категории (массой более 1 т): ASV (a), Ambler (б), Plustech (в), MECANT (г)
- Проблематика шагающих механизмов
- Обзор рынка
- Классификация и общие принципы
- Разработка конструкции макета
- Архитектура
- Обзор и обоснование выбора микроконтроллера
- Микроконтроллер
- Сеть
- Контроллер
- Датчики
- Программа контроллера
- Структура программного комплекса
- Программа монитор
- Демонстрационная программа
- Эксперименты
- Анализ рынка
- План производства
- План рисков
- Финансовый план и финансовая стратегия
- Охрана труда.
Самое читаемое:
Динамическое торможение электропривода
Динамическое
торможение электропривода, режим работы электропривода, при котором в
результате взаимодействия постоянного магнитного потока в электродвигателе с
током замкнутого электропроводящего контура создаётся тормозное усилие. В
электроприводе с электродвигателем постоянного тока Д. т. осуществляется замыканием
обмотки якоря н ...