Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Синтез контура скорости
Контур регулирования скорости приведен на рис. 5.2.1.
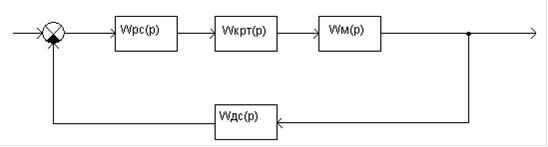
Рис. 5.2.1 Контур регулирования скорости
Расчетная модель объекта в контуре скорости без учета внутренней обратной связи
Модель контура регулирования скорости, которую будем использовать при расчете, приведена на рис. 5.2.1.1.
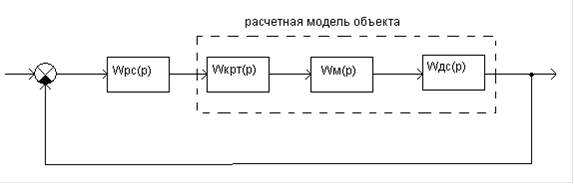
Рис. 5.2.1.1 Расчетная модель объекта контура скорости


Выбор метода синтеза и расчет параметров настройки регулятора скорости
Так как контур не содержит интегрирующих звеньев, то для дальнейшего расчета будем использовать метод модального оптимума.
Объект включает n инерционных звеньев, одно из которых имеет существенно большую постоянную времени.
![]()
Чтобы уменьшить время регулирования, необходимо каким-то образом компенсировать инерционность объекта, связанную с наличием большой постоянной времени ![]() . Это можно сделать, используя более сложный регулятор - пропорционально-интегральный.
. Это можно сделать, используя более сложный регулятор - пропорционально-интегральный.
![]()
Берем Ти=Т1=Тм=0,48.
Запишем передаточную функцию разомкнутой системы:

Передаточная функция замкнутой системы:

Здесь ![]() Воспользуемся условием оптимизации для нахождения постоянной интегрирования
Воспользуемся условием оптимизации для нахождения постоянной интегрирования ![]() :
:
![]() 2
2![]()

![]()
5.2.3 Вывод эквивалентной передаточной функции контура скорости
Подставим полученное выражение для постоянной интегрирования ![]() в передаточную функцию замкнутой системы:
в передаточную функцию замкнутой системы:

Для дальнейшего использования в выборе регуляторов других контуров представим передаточную функцию замкнутой системы в виде эквивалентной передаточной функции контура скорости 1-го порядка:
![]()
Построение переходных процессов в контуре скорости без учета внутренней обратной связи, с учетом внутренней обратной связи и эквивалентном контуре при отработке задающего воздействия
1) Построение переходного процесса в эквивалентном контуре скорости при отработке задающего воздействия и в контуре скорости без учета внутренней обратной связи.
Окно модели - рис. 5.2.4.1.
Переходные процессы имеют вид: рис.5.2.4.2, а - в эквивалентном контуре скорости; б - в контуре скорости без учета внутренней обратной связи.
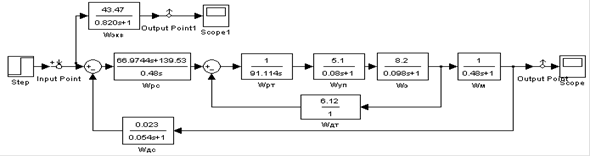
Рис. 5.2.4.1 Окно модели
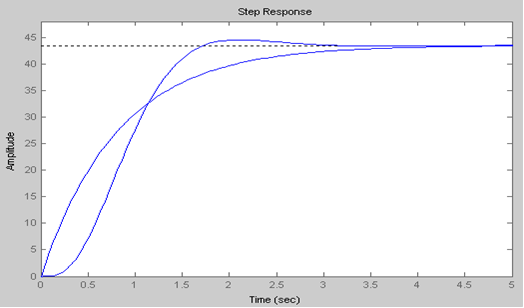
Рис. 5.2.4.2(a,б). Переходные процессы контура скорости
) Построение переходного процесса в контуре скорости с учетом внутренней обратной связи.
Окно модели представлено на рис. 5.2.4.3, переходной процесс - на рис. 5.2.4.4.
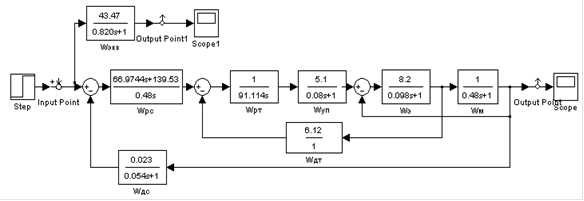
Рис. 5.2.4.3 Окно модели контура скорости с учетом внутренней ОС
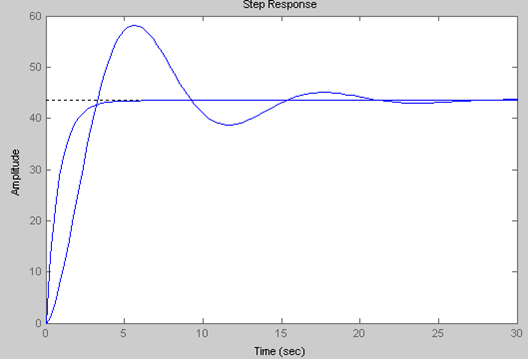
Рис. 5.2.4.4 Переходной процесс в контуре скорости
Определение прямых показателей качества переходных процессов
Для анализа качества скорректированной автоматической системы регулирования скорости определим прямые оценки качества для переходного процесса основной регулируемой величины w(t). С помощью переходного процесса контура скорости (рис. 5.2.5.1) определим прямые показатели качества.
Преобразования в MatLab, на основе полученных ранее результатов:
>> w9=feedback(w8,wdt)function:
.82
---------------------------------------
.7143 s^3 + 16.22 s^2 + 91.11 s + 255.9
>> w10=tf([1],[0.48 1])function:
---------
.48 s + 1
>> w11=series(w10,w9)function:
.82
-------------------------------------------------
.3429 s^4 + 8.499 s^3 + 59.95 s^2 + 214 s + 255.9
>> w12=tf([66.9744 139.53], [0.48 0])function:
.97 s + 139.5
--------------
.48 s
>> w13=series(w12,w11)function:
s + 5835
------------------------------------------------------
.1646 s^5 + 4.08 s^4 + 28.78 s^3 + 102.7 s^2 + 122.9 s
>> w14=tf([0.023], [0.054 1])function:
Самое читаемое:
Измерение спектральных характеристик волоконных световодов с органическими красителями
Измерение
температуры является одной из важнейших и неотъемлемых составляющих многих
технологических процессов. Однако в областях техники с воздействием сильных
электромагнитных полей, например, в силовой энергетике [1-3] (силовые
электрические машины, мощные трансформаторы, усилители и т.д.), в системах с
СВЧ-излучением (мощная р ...