Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Нахождение методом трапеций переходного процесса регулятором.
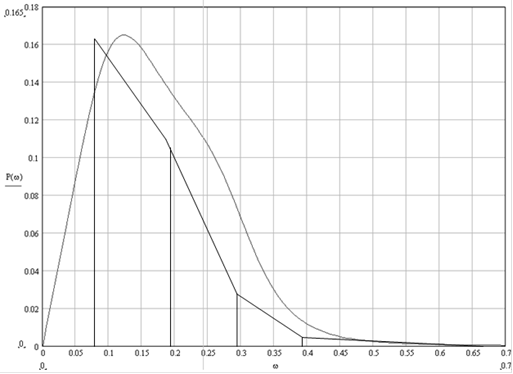
Рис. 2.
Проведем к графику 4 касательные так, чтобы получились 4 трапеции (рис. 2). Определим число λ для каждой из трапеций. Оно определяется по формуле:
 ,
,
где ![]() - координата первого основания, а
- координата первого основания, а ![]() - координата второго основания (по оси абсцисс).
- координата второго основания (по оси абсцисс).
Для получения ![]() необходимо вместо w подставить
необходимо вместо w подставить ![]() : Таким же образом находим
: Таким же образом находим ![]() и
и ![]() ,
,![]() и вписываем в таблицу 1.
и вписываем в таблицу 1.
|
Трапеция 1 |
Трапеция 2 |
Трапеция 3 |
Трапеция 4 | ||||
|
Р1(0) |
0,165 |
Р2(0) |
0,115 |
Р3(0) |
0,028 |
Р4(0) |
0,005 |
|
ωd1 |
0,14 |
ωd2 |
0,25 |
ωd3 |
0,35 |
ωd4 |
0,45 |
|
ωk1 |
0,25 |
ωk2 |
0,35 |
ωk3 |
0,45 |
ωk4 |
0,7 |
|
χ1= ωd1/ωk1 |
0,56 |
χ 2= ωd2/ωk2 |
0,7142857 |
χ 3= ωd3/ωk3 |
0,777778 |
χ 4= ωd4/ωk4 |
0,642857 |
Табл
|
Трапеция 1 |
Трапеция 2 |
Трапеция 3 | |||||||||
|
τ |
h(τ) |
t = τ/ωk1 |
h(t) = P1(0)∙h(τ) |
τ |
h(τ) |
t = τ/ωk2 |
h(t) = P2(0)∙h(τ) |
τ |
h(τ) |
t = τ/ωk3 |
h(t) = P3(0)∙h(τ) |
|
0 |
0 |
0,000 |
0,000 |
0 |
0 |
0,000 |
0,000 |
0 |
0 |
0,000 |
0,000 |
|
0,5 |
0,248 |
2,000 |
0,041 |
0,5 |
0,267 |
1,429 |
0,031 |
0,5 |
0,282 |
1,111 |
0,008 |
|
1 |
0,476 |
4,000 |
0,079 |
1 |
0,519 |
2,857 |
0,060 |
1 |
0,547 |
2,222 |
0,015 |
|
1,5 |
0,685 |
6,000 |
0,113 |
1,5 |
0,74 |
4,286 |
0,085 |
1,5 |
0,776 |
3,333 |
0,022 |
|
2 |
0,856 |
8,000 |
0,141 |
2 |
0,919 |
5,714 |
0,106 |
2 |
0,956 |
4,444 |
0,027 |
|
2,5 |
0,985 |
10,000 |
0,163 |
2,5 |
1,05 |
7,143 |
0,121 |
2,5 |
1,084 |
5,556 |
0,030 |
|
3 |
1,082 |
12,000 |
0,179 |
3 |
1,13 |
8,571 |
0,130 |
3 |
1,154 |
6,667 |
0,032 |
|
3,5 |
1,132 |
14,000 |
0,187 |
3,5 |
1,161 |
10,000 |
0,134 |
3,5 |
1,171 |
7,778 |
0,033 |
|
4 |
1,152 |
16,000 |
0,190 |
4 |
1,16 |
11,429 |
0,133 |
4 |
1,156 |
8,889 |
0,032 |
|
4,5 |
1,138 |
18,000 |
0,188 |
4,5 |
1,132 |
12,857 |
0,130 |
4,5 |
1,111 |
10,000 |
0,031 |
|
5 |
1,115 |
20,000 |
0,184 |
5 |
1,084 |
14,286 |
0,125 |
5 |
1,053 |
11,111 |
0,029 |
|
5,5 |
1,083 |
22,000 |
0,179 |
5,5 |
1,032 |
15,714 |
0,119 |
5,5 |
0,994 |
12,222 |
0,028 |
|
6 |
1,037 |
24,000 |
0,171 |
6 |
0,984 |
17,143 |
0,113 |
6 |
0,949 |
13,333 |
0,027 |
|
6,5 |
1,001 |
26,000 |
0,165 |
6,5 |
0,948 |
18,571 |
0,109 |
6,5 |
0,92 |
14,444 |
0,026 |
|
7 |
0,975 |
28,000 |
0,161 |
7 |
0,927 |
20,000 |
0,107 |
7 |
0,911 |
15,556 |
0,026 |
|
7,5 |
0,958 |
30,000 |
0,158 |
7,5 |
0,922 |
21,429 |
0,106 |
7,5 |
0,92 |
16,667 |
0,026 |
|
8 |
0,951 |
32,000 |
0,157 |
8 |
0,932 |
22,857 |
0,107 |
8 |
0,944 |
17,778 |
0,026 |
|
8,5 |
0,949 |
34,000 |
0,157 |
8,5 |
0,951 |
24,286 |
0,109 |
8,5 |
0,974 |
18,889 |
0,027 |
|
9 |
0,96 |
36,000 |
0,158 |
9 |
0,976 |
25,714 |
0,112 |
9 |
1,006 |
20,000 |
0,028 |
|
9,5 |
0,972 |
38,000 |
0,160 |
9,5 |
1 |
27,143 |
0,115 |
9,5 |
1,033 |
21,111 |
0,029 |
|
10 |
0,985 |
40,000 |
0,163 |
10 |
1,02 |
28,571 |
0,117 |
10 |
1,049 |
22,222 |
0,029 |
|
10,5 |
0,996 |
42,000 |
0,164 |
10,5 |
1,033 |
30,000 |
0,119 |
10,5 |
1,054 |
23,333 |
0,030 |
|
11 |
1,002 |
44,000 |
0,165 |
11 |
1,039 |
31,429 |
0,119 |
11 |
1,048 |
24,444 |
0,029 |
|
11,5 |
1,006 |
46,000 |
0,166 |
11,5 |
1,037 |
32,857 |
0,119 |
11,5 |
1,034 |
25,556 |
0,029 |
|
12 |
1,006 |
48,000 |
0,166 |
12 |
1,027 |
34,286 |
0,118 |
12 |
1,015 |
26,667 |
0,028 |
|
12,5 |
1,006 |
50,000 |
0,166 |
12,5 |
1,017 |
35,714 |
0,117 |
12,5 |
0,995 |
27,778 |
0,028 |
|
13 |
1,006 |
52,000 |
0,166 |
13 |
1,005 |
37,143 |
0,116 |
13 |
0,98 |
28,889 |
0,027 |
|
13,5 |
1,006 |
54,000 |
0,166 |
13,5 |
0,995 |
38,571 |
0,114 |
13,5 |
0,968 |
30,000 |
0,027 |
|
14 |
1,006 |
56,000 |
0,166 |
14 |
0,987 |
40,000 |
0,114 |
14 |
0,965 |
31,111 |
0,027 |
|
14,5 |
1,006 |
58,000 |
0,166 |
14,5 |
0,983 |
41,429 |
0,113 |
14,5 |
0,969 |
32,222 |
0,027 |
|
15 |
1,007 |
60,000 |
0,166 |
15 |
0,983 |
42,857 |
0,113 |
15 |
0,978 |
33,333 |
0,027 |
|
15,5 |
1,007 |
62,000 |
0,166 |
15,5 |
0,985 |
44,286 |
0,113 |
15,5 |
0,991 |
34,444 |
0,028 |
|
16 |
1,008 |
64,000 |
0,166 |
16 |
0,99 |
45,714 |
0,114 |
16 |
1,003 |
35,556 |
0,028 |
|
16,5 |
1,008 |
66,000 |
0,166 |
16,5 |
0,995 |
47,143 |
0,114 |
16,5 |
1,014 |
36,667 |
0,028 |
|
17 |
1,007 |
68,000 |
0,166 |
17 |
0,999 |
48,571 |
0,115 |
17 |
1,02 |
37,778 |
0,029 |
|
17,5 |
1,005 |
70,000 |
0,166 |
17,5 |
1,002 |
50,000 |
0,115 |
17,5 |
1,023 |
38,889 |
0,029 |
|
18 |
1,002 |
72,000 |
0,165 |
18 |
1,004 |
51,429 |
0,115 |
18 |
1,02 |
40,000 |
0,029 |
|
18,5 |
0,999 |
74,000 |
0,165 |
18,5 |
1,003 |
52,857 |
0,115 |
18,5 |
1,014 |
41,111 |
0,028 |
|
19 |
0,995 |
76,000 |
0,164 |
19 |
1,004 |
54,286 |
0,115 |
19 |
1,006 |
42,222 |
0,028 |
|
19,5 |
0,992 |
78,000 |
0,164 |
19,5 |
1,003 |
55,714 |
0,115 |
19,5 |
0,998 |
43,333 |
0,028 |
|
20 |
0,991 |
80,000 |
0,164 |
20 |
1,003 |
57,143 |
0,115 |
20 |
0,991 |
44,444 |
0,028 |
|
20,5 |
0,991 |
82,000 |
0,164 |
20,5 |
1,001 |
58,571 |
0,115 |
20,5 |
0,986 |
45,556 |
0,028 |
|
21 |
0,993 |
84,000 |
0,164 |
21 |
0,999 |
60,000 |
0,115 |
21 |
0,983 |
46,667 |
0,028 |
|
21,5 |
0,995 |
86,000 |
0,164 |
21,5 |
0,998 |
61,429 |
0,115 |
21,5 |
0,986 |
47,778 |
0,028 |
|
22 |
0,996 |
88,000 |
0,164 |
22 |
0,997 |
62,857 |
0,115 |
22 |
0,991 |
48,889 |
0,028 |
|
22,5 |
1 |
90,000 |
0,165 |
22,5 |
0,996 |
64,286 |
0,115 |
22,5 |
0,998 |
50,000 |
0,028 |
|
23 |
1,001 |
92,000 |
0,165 |
23 |
0,997 |
65,714 |
0,115 |
23 |
1,002 |
51,111 |
0,028 |
|
23,5 |
1,002 |
94,000 |
0,165 |
23,5 |
0,998 |
67,143 |
0,115 |
23,5 |
1,007 |
52,222 |
0,028 |
|
24 |
1,002 |
96,000 |
0,165 |
24 |
0,999 |
68,571 |
0,115 |
24 |
1,008 |
53,333 |
0,028 |
|
24,5 |
1,002 |
98,000 |
0,165 |
24,5 |
1 |
70,000 |
0,115 |
24,5 |
1,008 |
54,444 |
0,028 |
|
25 |
1,002 |
100,000 |
0,165 |
25 |
1,001 |
71,429 |
0,115 |
25 |
1,005 |
55,556 |
0,028 |
|
25,5 |
1,002 |
102,000 |
0,165 |
25,5 |
1,002 |
72,857 |
0,115 |
25,5 |
1,004 |
56,667 |
0,028 |
|
26 |
1,002 |
104,000 |
0,165 |
26 |
1,002 |
74,286 |
0,115 |
26 |
1,002 |
57,778 |
0,028 |
Самое читаемое:
Аппаратура цифровой радиосвязи в нелицензируемой полосе частот
Аппаратура
цифровой радиосвязи предназначена для решения широкого круга задач беспроводной
связи (дистанционного управления, телеметрии, сигнализации и оповещения) на
небольших территориях. Она находит применение в инженерных системах жилых
микрорайонов, в системах пожарной и охранной сигнализации, в
производственно-технологических ...