Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Синтез цифровой системы управления методом канонической фазовой переменной
G =[2.1966 1.6386 2.4299]
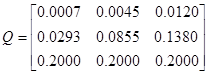
Cоставляем матрицу управляемости Q, в нашем случае она выражается в виде Q=[![]() ] и её численные значения
] и её численные значения
 ;
;
определитель матрицы Q не равен 0, что означает - матрица Q не вырождена, следовательно, система управляема.
Перейти на страницу: 1 2
Самое читаемое:
Разработка мер совершенствования системы инженерно-технической защиты информации в конференц-зале коллекторского агентства
В современных условиях информация играет решающую роль, как в
процессе экономического развития, так и в ходе конкурентной борьбы на
внутреннем и внешнем рынках.
Успешное функционирование и развитие предприятий все больше
зависит от совершенствования их деятельности в области обеспечения
информационной безопасности в сфере произво ...
www.techstages.ru : Все права защищены! 2026