Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Схемы и принцип работы контроллера последовательно-параллельного интерфейса
Чтобы облегчить построение схем сопряжения внешних устройств с последовательным форматом выходных сигналов при создании микропроцессорных систем, в состав комплектов микропроцессорных БИС включается БИС контроллера последовательно-параллельного интерфейса. Такие контроллеры интерфейса имеют различную сложность, свои специфические особенности, но функции, выполняемые ими, практически одинаковы и соответствуют смысловому названию БИС универсальных асинхронных приемников-передатчиков (УАПП) или асинхронных интерфейсных адаптеров связи (АСИА).
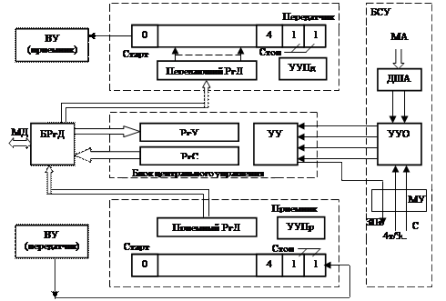
Рис.7 Функциональная структура асинхронного приемопередатчика
Рассмотрим особенности функционального построения и режим работы типового БИС УАПП (рис.7). В структуре БИС УАПП содержатся следующие основные электронные блоки: приемник последовательных сигналов, выполняющий преобразование данных последовательного формата в параллельный код; передатчик сигналов, осуществляющий преобразование параллельного кода в последовательный формат; блок центрального управления, блок буферного хранения данных и блок связи с информационной магистралью микропроцессора, блок системного управления.
Как и любой другой компонент электронной информационно-управляющей системы, БИС УАПП имеет адресное программное управление. УАПП по командам МП может выполнять четыре операции, для задания которых достаточно выдавать коды двух адресов и управляющий сигнал на магистрали управления “Чтение/запись” (Чт/Зп).
Рассмотрим выполнение команд УАПП.
. Записать слово в передающий регистр данных. По этой команде слово данных из аккумулятора МП передается в передающий регистр данных (РгД) передатчика через буферный регистр данных (БРгД). Затем это слово данных передается в сдвигающий регистр данных передатчика и выдается в последовательном формате в интерфейс соответствующего внешнего устройства.
. Считать слово из приемного регистра данных. При выполнении этой команды в аккумулятор МП передается слово данных, образованное в результате параллельной передачи из сдвигающего регистра приемника после окончания приема одного слова данных в последовательном формате.
. Записать код управляющего слова в регистр сигналов управления. Блок центрального управления преобразует сигналы триггеров регистра управления (РгУ) (обычно восьмиразрядного) в сигналы управления различными блоками. Микропроцессор передает в БЦУ информацию о внешнем источнике синхронизации, формате последовательного кода и направлении передачи. В коде управления форматом задается число разрядов данных (обычно до восьми), число СТОП битов и признаки четности. Этой информации достаточно для программирования работы УАПП по передаче данных.
. Считать информацию состояния. При осуществлении операции ввода данных МП может осуществлять считывание, ввод и анализ статусной информации УАПП, которая хранится в регистре состояния (РгС) (обычно восьмиразрядный).
Рассмотрим режим взаимодействия МП и УАПП при вводе последовательных данных от внешнего устройства (ВУ). В программе работы МП должен быть предусмотрен процесс инициализации УАПП, который осуществляется засылкой управляющей информации в РгУ по команде 3. В составе этой управляющей информации имеются сигналы “Разрешение прерывания” (РПр) и “Готовность слова данных” (ГСД). Получив управляющую информацию, УАПП начинает анализ слова данных на входе и их ввод при наличии сигнала СТАРТ в коде слова данных. Когда в приемный РгД передается полное слово данных, то в триггере готовности слова данных устанавливается уровень “1”. Установка этого триггера является основанием для генерации сигнала запроса прерывания МП, если ранее от МП в составе управляющего слова поступил сигнал уровня “1”. На разрешение передачи слова микропроцессор вырабатывает сигнал “Запрос прерывания удовлетворен” и осуществляет переход на выполнение программы прерывания по вводу данных.
В программе прерывания, прежде всего, осуществляются сохранение информационного содержания внутренних регистров МП и блокировка других сигналов прерывания на входе блока прерывания МП. Затем выполняется команда 4 и следует анализ тех битов информации состояния, которые связаны с контролем правильности выполнения операции приема данных, т.е. проверяется нарушение четности, переполнение или определяются ошибки форматирования. Если произошла ошибка, то совершается переход к подпрограмме анализа причин ошибок. Если ошибок нет, то выполняется команда 2, и принятые данные передаются в аккумулятор или какой-либо регистр МП. Затем МП снимает блокировку сигналов блока прерывания, восстанавливает состояние прерванной программы и продолжает ее выполнение до получения следующего сигнала запроса прерывания.
Самое читаемое:
Автоматизация технологических процессов в условиях технологического комплекса КК-АДСК-МНЛЗ ПАО МК Азовсталь, г. Мариуполь
Автоматизация управления технологическими процессами и
производством играет важную роль в непрерывном увеличении выпуска продукции в
нашей стране. Интенсификация и усложнение технологических процессов, рост
единичной мощности агрегатов и повышение требований к качеству готовой
продукции в соответствии с международными стандартами де ...