Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Блок параллельного интерфейса / таймера
Согласно исходным данным к разработанной микропроцессорной системе необходимо подключить периферийные устройства - последовательные порты ввода-вывода (DUART) и параллельные порты ввода-вывода (PI). Для этого используются имеющиеся в микропроцессорном комплекте микросхемы сдвоенного универсального асинхронного последовательного приёмопередатчика МС68681 и параллельный интерфейс / таймер МС68230. Микросхема МС 68230 включает в себя:
– 3 многофункциональных восьмиразрядных порта;
– многофункциональный 24-разрядный таймер с возможностью использования пяти разрядного предделителя;
– устройство управления режимами работы;
– логику прямого доступа к памяти;
– логику управления прерываниями.
Функциональное обозначение МС68230 представлено на рис. 2.5, назначение выводов в табл. 2.3.
Таблица 2.3 - Назначение выводов микросхемы МС 68230
|
Наименование вывода |
Функциональное назначение вывода |
Примечание |
|
D7 - D0 |
Шина данных. |
- |
|
DTACK |
Подтверждение передачи данных. |
- |
|
R/W |
Чтение / Запись. |
- |
|
CS |
Выбор микросхемы. |
- |
|
RESET |
Сброс. |
- |
|
RS5-RS1 |
Выбор внутреннего регистра, порта или команды |
- |
|
CLK |
Тактовая частота микросхемы |
- |
|
H4-H1 |
Линии квитирования |
Могут быть использованы как линии ввода / вывода (H1 и Н3 - только ввод) или импульсные входы запросов на обслуживание внешних прерываний |
|
PA7 - РА0 |
Порт А |
- |
|
РВ7 - РВ0 |
Порт В |
- |
|
РС7 - РС0 |
Порт С |
Линии РС7 + РС2 имеют альтернативные функции. |
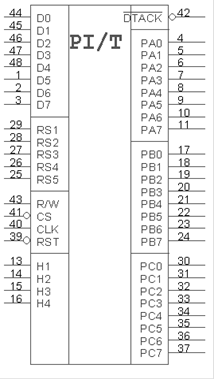
Рисунок 2.5 - Функционально-принципиальная схема PI/T
Структура микросхемы PI/T типа МС68230 включает блоки, обеспечивающие связь с микропроцессором и блоки, обслуживающие внешние устройства. Выводы РС7-2 порта С могут программироваться для передачи сигналов таймера, прерывания, запроса прямого доступа.
Связь PI/T с микропроцессором MC68000 реализуется путём обмена данными по линиям D7-0 в цикле чтения или записи. При этом от микропроцессора поступает соответствующий сигнал R/W#, a PI/T выдаёт сигнал подтверждения готовности DTACK#. Данные считываются или записываются в один из регистров таймера, порта А, В, С или блока управления обменом. Выбор регистра определяется адресным кодом, поступающим на входы RS5-1. Все регистры, кроме CNT, СРТ, имеют 8 разрядов, поэтому адресуются как байт. Регистры таймера CNT, СРТ, имеющие 24 разряда, адресуются как три отдельные 8-ми разрядные регистры. В адресном пространстве PI/T занимает 32 байтовых ячейки, из которых 23 ячейки заняты регистрами, остальные остаются неиспользуемыми. При обращении к PI/T на входы RS5-1 поступают соответствующие разряды формируемого микропроцессором адреса. На вход CLK поступают тактовые сигналы от генератора тактовых импульсов. На вход RESET# подаётся общий для всей системы сигнал сброса.
Программирование портов А, В, С и таймера на выполнение различных режимов обслуживания внешних устройств производится путём записи управляющих кодов в регистры управления соответствующих блоков PI/T.
Порты А и В обеспечивают параллельный обмен данными между микропроцессором и внешними устройствами.
Таймер реализован на базе 24-х разрядного вычитающего счётчика (CNT), начальное состояние которого устанавливается при инициализации, путём записи содержимого в регистр предварительной установки CPR. Запуск таймера происходит при записи в регистр управления TCR соответствующего управляющего кода, который определяет также режим его функционирования. При этом уменьшение содержимого CNT может производиться при поступлении тактовых импульсов CLK или внешних сигналов на вход TIN#. В режиме генерации (счёт импульсов CLK) таймер через интервалы времени, определяемые содержимым CPR, формирует сигналы на выходе TOUT#. В режиме счёта событий текущее содержимое CNT указывает число поступивших сигналов. Можно запрограммировать деление частоты считаемых импульсов на 32. При работе таймера на выходе TOUT# формируются прямоугольные импульсы, которые могут служить для управления внешними устройствами (периодическое включение-выключение, синхронизация и т.п.). Сигнал TOUT# может подаваться также на вход приоритетного шифратора в качестве запроса прерывания для микропроцессора. При этом сигнал подтверждения прерывания должен поступать на вход ТIАСК#. Для считывания вектора прерывания микропроцессор должен обратиться к регистру TIVR, в который значение этого вектора вводится в процессе инициализации таймера. Таким образом, использование таймера позволяет запускать требуемую программу в заданные моменты.
Самое читаемое:
Молекулярно-лучевая эпитаксия
Работы по исследованию искусственно созданных полупроводниковых
сверхрешеток были инициированы идеей о создании одномерной периодической
структуры чередующихся сверхтонких слоев, высказанной в 1969 г. Эсаки и Цу.
Изготовление подобной кристаллической структуры из сверхтонких слоев
представляло в то время необычайно сло ...