Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Проектирование программы для удаленного контроллера Simatic S7-400 фирмы Siemens
Исполняемые блоки программы содержат команды. Команда - это рабочее указание процессу. Она состоит из операционной части и операнда, а операнд, в свою очередь, из типа операнда и номера операнда. На рисунке 2.11 представлена структура команды.
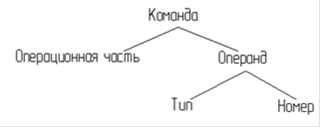
Рисунок 2.11 - Структура команды
Операционная часть описывает выполняемую функцию, т.е. что должен сделать процессор. Операнд содержит данные, необходимые для выполнения операции, т.е. с чем должен работать процессор. Операнд команды задает константу или адрес, по которому команда находит значение, с которым она должна выполнить операцию.
В языке программирования контроллера имеются следующие типы операндов:
отображение входов E - область памяти контроллера, куда поступают данные с модулей дискретного ввода;
отображение выходов A - область памяти контроллера, данные из которой передаются в модули дискретного вывода;
метки M - область памяти контроллера, предназначенная для хранения промежуточных результатов обработки;
таймеры T - реализуют функции времени;
счетчики Z - реализуют функции счета;
константы - неизменяемые числа;
блоки OB, PB, FB, DB - блоки, составляющие программу.
В таблице 2.2 дано описание логических команд, которые используются языком программирования Step 7.
Таблица 2.2 - Описание логических команд
|
Команда |
Описание |
|
U |
Операция «И», опрос сигнала на «1», результат опроса = 1 , если соответствующий операнд имеет состояние сигнала «1», в противном случае результат опроса = 0. Результат устанавливает VKE в процессоре после выполнения функции «И». |
|
O |
Операция «ИЛИ», опрос сигнала на «1» , результат опроса= 1 , если соответствующий операнд имеет состояние сигнала «1», в противном случае результат опроса= 0. Результат устанавливает VKE в процессоре после выполнения функции «ИЛИ». |
|
Команда |
Описание |
|
UN |
Операция «И», опрос сигнала на «0» , результат опроса= 1 , если соответствующий операнд имеет состояние сигнала «1», в противном случае результат опроса= 0. Результат устанавливает VKE в процессоре после выполнения функции «И». |
|
ON |
Операция «ИЛИ», опрос сигнала на «0» ,результат опроса= 1 , если соответствующий операнд имеет состояние сигнала «1», в противном случае результат опроса= 0. Результат устанавливает VKE в процессоре после выполнения функции «ИЛИ». |
|
O |
Операция «ИЛИ» над функциями «И», выполнение операции ИЛИ над VKE предыдущей и последующей функций И |
|
U( |
Операция «И»,VKE выражения в скобках взаимодействует с VKE предыдущей функции И. |
|
O( |
Операция «ИЛИ» , VKE выражения в скобках взаимодействует с VKE предыдущей функции ИЛИ. |
|
) |
Закрывающая скобка Эта операция завершает выражения в скобках. |
Самое читаемое:
Оснащение участка железной дороги аппаратурой многоканальной связи с использованием волоконно-оптического кабеля
В настоящее время связь проникла во все сферы человеческой деятельности и
является одним из наиболее быстро развивающихся элементов инфраструктуры
общества.
Телекоммуникационные технологии очень широко применяются на
железнодорожном транспорте. Для повышения эффективности и качества работы
железнодорожного транспорта необходима с ...