Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Построение амплитудной частотной характеристики замкнутой нескорректированной системы
Модель замкнутой нескорректированной системы в Simulink MatLab показана на рис. 4.3.1.
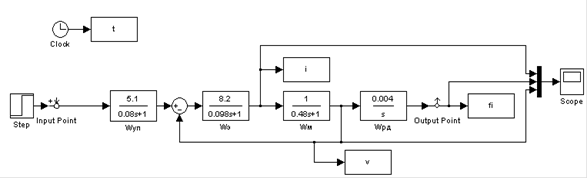
Рис. 4.3.1 Модель нескорректированной замкнутой системы
Преобразования в MatLab, на основе полученных ранее результатов:
>> w5=tf([1],[1])function:
>> w6=feedback(w4,w5)function:
.1673
------------------------------------------------------
.003763 s^4 + 0.09328 s^3 + 1.314 s^2 + 9.2 s + 0.1673
>> bode(w6)
Системе соответствуют следующие АЧХ и ФЧХ (рис. 4.3.2):
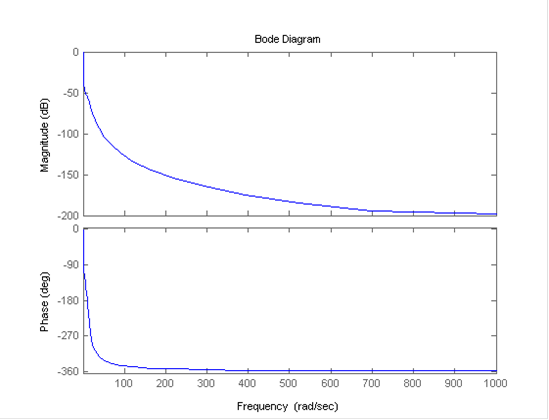
Рис. 4.3.2 а- АЧХ замкнутой нескорректированной системы, б- ФЧХ замкнутой нескорректированной системы
Самое читаемое:
Задачи исследования защищённости информации от утечки по каналу ПЭМИН
Электромагнитные поля, возникающие как побочный продукт работы
устройств обработки информации, и вызываемые этими полями наведенные напряжения
называют побочными электромагнитными излучениями и наводками (ПЭМИН). Задача
анализа опасности ПЭМИН с позиций возможности утечки информации является весьма
сложной и трудоемкой. Для е ...