Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Синтез системы регулирования электропривода промышленного робота
Использование многоконтурных систем регулирование объясняется следующей причиной. Объекты регулирования могут включать звенья запаздывания и иметь существенную инерционность. Для качественного управления такими объектами одноконтурных схем уже недостаточно.
Синтез многоконтурных систем начинается с внутреннего контура.
Датчики, измеряющие дополнительную регулируемую величину, устанавливают ближе ко входу объекта. Реальный датчик располагается в обратной связи системы. Но при синтезе системы датчик относят к объекту регулирования, а когда выполняется моделирование, то его возвращают в обратную связь.
Контур регулирования тока выглядит следующим образом (рис. 5.1.1):
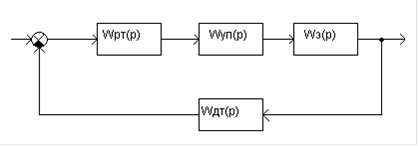
Рис. 5.1.1 Контур регулирования тока
Расчетная модель объекта в контуре тока
Расчетная модель объекта в контуре тока приведена на рис. 5.1.1.1.
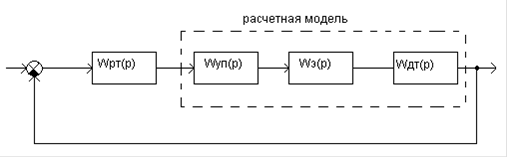
Рис. 5.1.1.1 Расчетная модель объекта
Запишем передаточную функцию расчетной модели объекта:
![]()
![]()
![]()
где ![]()
Выбор метода синтеза и расчет параметров настройки регулятора тока
Контур не содержит интегрирующих звеньев, следовательно, для дальнейшего расчета будем использовать метод модального оптимума.
Так как постоянные времени ТП и ТЭ соизмеримы, то в соответствии с методом модального оптимума необходимо применять интегральный регулятор:
![]()
Запишем передаточную функцию разомкнутой системы:
![]()
Передаточная функция замкнутой системы:
![]()
Здесь ![]()
Воспользуемся условием оптимизации для нахождения постоянной интегрирования ![]() :
:
![]()
![]()
Вывод эквивалентной передаточной функции контура тока
Подставим полученное выражение для постоянной интегрирования ![]() в передаточную функцию замкнутой системы:
в передаточную функцию замкнутой системы:
![]()
Для дальнейшего использования в выборе регуляторов других контуров представим передаточную функцию замкнутой системы в виде эквивалентной передаточной функции контура тока 1-го порядка:

Построение переходных процессов в контуре тока и эквивалентном контуре тока при отработке задающего воздействия
Построим переходные процессы в контуре тока и эквивалентном контуре тока при отработке задающего воздействия в Simulink MatLab. Окно модели показано на рис. 5.1.4.1.
Для построения переходных процессов в контуре тока и эквивалентном контуре воспользуемся Simulink Matlab.
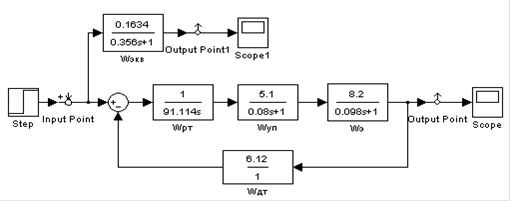
Рис. 5.1.4.1. Структурная схема контура тока и эквивалентного контура тока
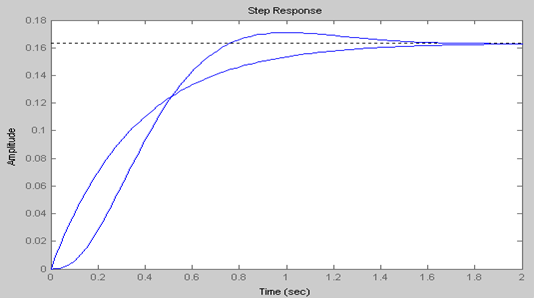
Рис. 5.1.4.2. Переходной процесс в контуре тока и в эквивалентном контуре тока
Определение прямых показателей качества переходных процессов
Среди возможных режимов системы регулирования важное значение имеют переходные процессы, возникающие при быстром изменении задающего воздействия или возмущения от одного значения до другого. При этом чем с большей скоростью и плавностью протекает такой процесс, тем меньше его продолжительность и величина рассогласования. Поэтому одной из оценок качества регулирования является оценка качества переходного процесса в замкнутой системе при отработке единичного ступенчатого задающего воздействия. Эти оценки качества называются прямыми. К ним относят:
Самое читаемое:
Молекулярно-лучевая эпитаксия
Работы по исследованию искусственно созданных полупроводниковых
сверхрешеток были инициированы идеей о создании одномерной периодической
структуры чередующихся сверхтонких слоев, высказанной в 1969 г. Эсаки и Цу.
Изготовление подобной кристаллической структуры из сверхтонких слоев
представляло в то время необычайно сло ...