Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Синтез контура положения
Рис.5.11 Контур регулирования положения
Расчетная модель контура положения
Рис.5.12 Расчетная модель объекта
![]()
Так как Тэкв - это расчетная величина, то δ=Тэкв, тогда
![]()
Выбор метода синтеза и расчет параметров настройки регулятора положения
В данном случае метод модального оптимума в общем случае применять нельзя, т.е. выбирать значения постоянных интегрирования Ти и дифференцирования Тд исходя из условий компенсации нельзя, т.к. это приводит к неустойчивости системы.
Это обусловлено тем, что на интегральный характер регулятора накладываются интегральные свойства объекта. В этом случае можно использовать метод симметричного оптимума.
Т.к. Тэкв>Тдп, то в этом случае рекомендуется ПИД-регулятор
![]()
Запишем передаточную функцию разомкнутой системы:
![]()
Запишем соответствующую передаточную функцию замкнутой системы:

Воспользуемся условиями оптимизации и получим Ти=4δ, Крег=1/2КрКдпδ.
Подставляем полученные выражения в передаточную функцию замкнутой системы:
![]()
Построение переходных процессов в синтезированной системе с учетом и без учета внутренней обратной связи при отработке задающего воздействия и возмущения нагрузкой. Определение прямых показателей качества переходных процессов
Для большинства реальных объектов регулирования Δy=40% ПИД-регулирование не допустимо. Поэтому необходимо уменьшить перерегулирование.
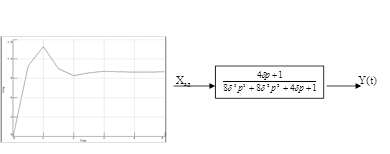
Рис.5.15
. Перерегулирование ![]() y переходного процесса скорректированной системы из графика:
y переходного процесса скорректированной системы из графика: ![]() y=39%.
y=39%.
. Время регулирования находим из графика: p=1,2 с.
Время нарастания: н=0,7 c.
Для того, чтобы уменьшить перерегулирование необходимо отфильтровать задающее воздействие
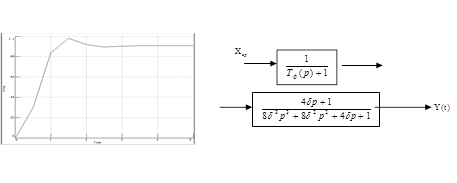
Рис.5.16
. Перерегулирование ![]() y переходного процесса скорректированной системы из графика: y=8%.
y переходного процесса скорректированной системы из графика: y=8%.
. Время регулирования находим из графика: p=2 с.
Время нарастания: н=1,6 c.
Самое читаемое:
Опыт и проблемы лицензирования телекоммуникационных услуг на материалах центра продаж и обслуживания клиентов Ростелеком
Российский рынок телекоммуникационных услуг замедляется в своем росте,
однако в 2010 г. темпы были все еще довольно высоки - около 20%. Рынок услуг
сотовой связи технологически неразрывно связан с использованием ограниченного
национального ресурса - радиочастотного спектра страны. Данное обстоятельство
обусловливает не ...