Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Проблематика шагающих механизмов
Создание шагающих механизмов - это задача с очень давней историей. Пожалуй, основные конструкторские принципы были еще в IX веке в работах Чебышева.
На рис 2 изображен стопоходящий механизм П.Л. Чебышева.
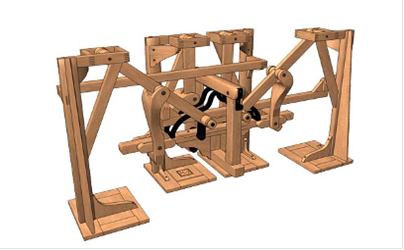
Рис 2. Стопоходящий механизм Чебышева
Сегодня исследования по механике и управлению движением мобильных роботов проводятся во всех развитых странах мира.
В области теории их движения и управления Россия, благодаря работам Ю. Ф. Голубева, В. Г. Градецкого, Е. А. Девянина, С. Л. Зенкевича, И. А. Каляева, А. В. Ленского, В. А. Лопоты, И. М. Макарова, И. В. Новожилова, Д. Е. Охоцимского, В. Е. Павловского, В. Е. Пряничникова, А. В. Тимофеева, А. М. Формальского, Е. И. Юревича, А. С. Ющенко и др. занимает одно из ведущих мест в мире.
Вопросы механики шагающих движителей наиболее детально рассматриваются в работах ученых Института машиноведения РАН, где разработана теория построения рациональных движителей многоногих шагающих машин.
В области теории движения и управления шагающими роботами адаптивного типа наиболее известны работы ученых Института прикладной математики РАН и Института механики МГУ показано, что решение таких сложных задач как построение адаптивного движения конечностей, обеспечение статической устойчивости шагающих машин, стабилизация и управление движением и др. могут быть успешно решены.
Наиболее детально вопросы механики и управления движением многоногих шагающих аппаратов рассмотрены в монографии Д. Е. Охоцимского и Ю. Ф. Голубева. В работе определяются методы описания и исследования походок многоногой машины, рассматриваются вопросы статической устойчивости и распределения реакций при движении шагающей машины, описывается динамическая модель движения, рассмотрены вопросы построения движения шагающих движителей, вопросы стабилизации движения и методы построения законов движения машины на местности.
При разработке шагающих аппаратов весьма актуальны проблемы динамики и управления движением. Так же рассматриваются вопросы математического моделирования управления движением и энергозатраты; рассматриваются задачи динамики управляемого движения шагающих машин и вопросы связанные с синтезом их систем. Разрабатываются алгоритмы управления и динамическая и динамическая модель управления шагающими аппаратами. На практике часто используют несколько математических моделей для изучения характеристик одной и той же машины в разных режимах ее движения, учитывая наиболее существенные для данного режима факторы. В этих условиях целесообразно иметь универсальную обобщенную динамическую модель, которая может быть трансформирована в более простые модели при решении частных задач [Чернышев, 2008] Однако, для поставленных задач в данном дипломном проекте, нет необходимости в построении математической модели, поэтому все исследования будут проводиться на натурном макете.
Самое читаемое:
Разработка микропроцессорной системы на основе процессора MC68000
микропроцессор память блок шина
1.
Разработать
микропроцессорную систему на базе процессора MC68000.
2.
Разработать и нарисовать
структурную и принципиальную схему МПС. Произвести подключение шины адреса,
данных и управления к соответствующим блокам на схеме. Сформировать блок
устройства памяти (ОЗУ и ПЗУ) и подключить е ...