Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Разработка конструкции макета
Была разработана система управления ходьбой шестиногого робота, каждая из конечностей которого приводится в движение с помощью трех сервомоторов (всего 18 приводов). Наличие микроконтроллера в системе управления позволяет задать произвольный сдвиг фаз в работе двигателей и, таким образом, обеспечить реализацию походки любого типа. Очевидно, управление перемещением шагающего аппарата должно быть организовано так, чтобы при ходьбе ни одна из конечностей не создавала помех для другой. Естественно, самое простое решение проблемы предотвращения столкновений движущихся конечностей - принципиальное устранение самой возможности столкновений путем выбора границ зон достижимости каждой из ног таким образом, чтобы соседние зоны не имели перекрытий. [asar.my1.ru]. Однако в данном разрабатываемом макете данные зоны пересечения существует. Это связано с тем, что конструкция макета при размерах исключающих зоны пересечения конечностей будет иметь избыточный вес, что в свою очередь приведет к избыточной нагрузке на сервоприводы. А проблема пересечения зон решается программным путем управления конечностями.
О степенях свободы. Существует множество шестиногих и четырехногих моделей шагающих роботов, которые требуют больших степеней свободы в своих ногах. Соответственно, наличие большего количества степеней свободы требует большего количества управляющих механизмов для каждой из ног. Если для этой цели используются сервомоторы, то для каждой ноги потребуются два, три или даже четыре двигателя. Необходимость в таком количестве сервомоторов (приводов) диктуется тем, что требуется как минимум две степени свободы. Одна для опускания и поднимания ноги, а другая - для движения ее вперед-назад. Однако две степени свободы позволяют реализовать передвижение только вперед-назад и повороты, но не дают возможности использования разных видов походок На рис 8 представлена модель шестиногого шагающего робота имеющего всего три степени свободы. Эта модель разработана в лаборатории робототехники Политехнического музея. Модель приводится в движение за счет работы трех сервоприводов и механизма синхронизации ног.
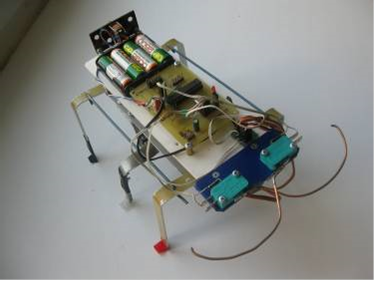
Рис8. Робот с тремя степенями свободы
В разрабатываемом макете будет использоваться три степени походки на одну ногу (рис. 9). Схема избыточна, однако позволяет реализовать различные варианты походки.
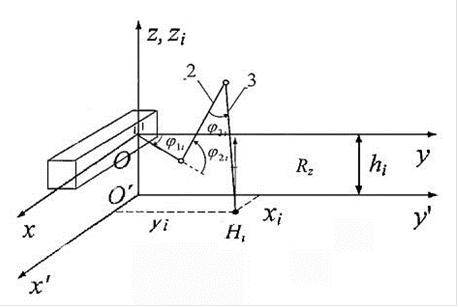
Рис.9. Кинематическая схема ноги
Форма корпуса выбрана округлой, что позволяет реализовать движение в любых направлениях (рис 10).
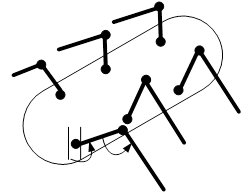
Рис10. Укрупненная кинематическая схема робота
На рис 11 представлен внешний вид ноги.
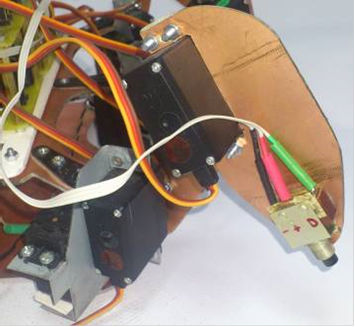
Рис 11. Внешний вид ноги
Предложенная кинематическая схема и конструкция робота была промоделирована с помощь пакета 3Ds Max, см. рис 12.
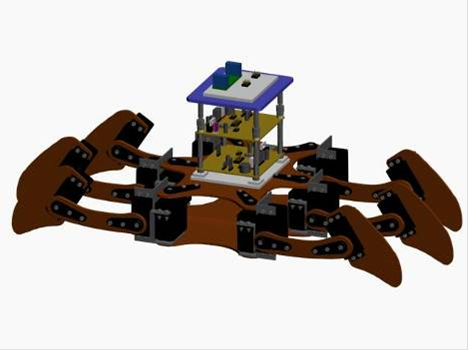
Рис. 12 3D модель
Самое читаемое:
Аппаратура цифровой радиосвязи в нелицензируемой полосе частот
Аппаратура
цифровой радиосвязи предназначена для решения широкого круга задач беспроводной
связи (дистанционного управления, телеметрии, сигнализации и оповещения) на
небольших территориях. Она находит применение в инженерных системах жилых
микрорайонов, в системах пожарной и охранной сигнализации, в
производственно-технологических ...