Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Демонстрационная программа
Демонстрационная программа реализует базовые алгоритмы управления шагающим роботом. Программа представляет собой консольное приложение, работающее под управлением ОС Windows XP. Написана на языке СИ. Внешний вид программы представлен на рис 22.
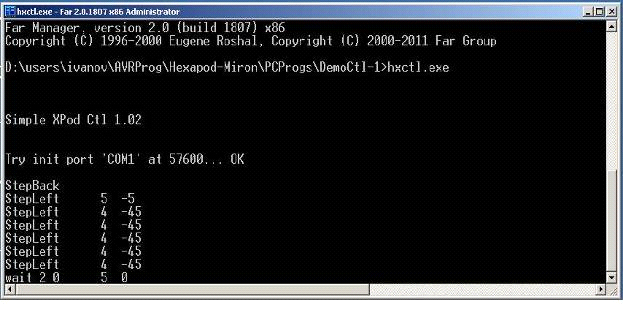
Рис 22. Интерфейс демонстрационной программы
Демонстрационная программа работает следующим образом: открывается COM-порт, по которому через переходник на RS485 интерфейс будут передаваться управляющие сигналы контроллерам. Далее происходит инициализация самих контроллеров. После чего идет считывание файла конфигурации mdf. Далее происходит считывание состояний датчиков и если после этого будет нажата клавиша на клавиатуре, то система переключается на ручной режим и управление производится с клавиатуры. Если же ничего не было нажато, то система переключается автоматический режим и робот передвигается самостоятельно, опираясь на данные полученные с датчиков. Завершение программы производится по нажатию клавиши «ESC».
Алгоритм работы программы приведен на рис. 23.
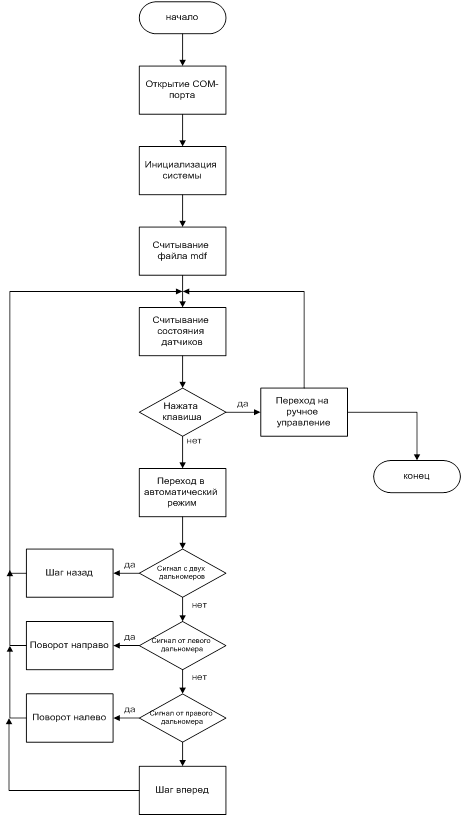
Рис. 23. Алгоритм работы демонстрационной программы
Самое читаемое:
Исследование электромагнитной обстановки в помещении при воздействии сверхкоротких электромагнитных импульсов на электронные средства
Задача борьбы с электромагнитными воздействиями возникла почти
одновременно с электроникой, но в то время самостоятельного значения не имела и
особых трудностей для своего решения не представляла. Трудности появились с
увеличением количества технических средств, в частности электронных средств
(ЭС), усложнением и ...