Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Устройство для диагностирования состояния теплового насоса
Устройство используется в области теплоэнергетики . Предназначено для автоматического сбора, анализа и хранения информации о работе теплового насоса компрессионного типа , , а также электроцентробежными насосами (ЭЦН).
Схема устройства для диагностирования состояния насоса представлена на рисунке 1.3
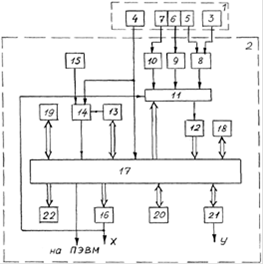
Рисунок 1.3 Схема устройства для диагностирования состояния
Для проведения диагностирования технического состояния компрессионного теплового насоса все датчики устанавливают в соответствующем месте, выходы датчиков подключают к входу вторичного прибора, на соответствующие тракты измерения блока регистрации 2.
Режим работы устройства выбирают с помощью клавиатуры 18. Запись информации о техническом состоянии производят в течение одного или кратного количества циклов работы насоса . Рабочий цикл определяют по интервалу времени между двумя "мертвыми" точками положения.
При снятии динамограммы, характеризующей работу насоса, в блоке регистрации 2 в оперативно-запоминающем устройстве 20 задается область, в которую будет заноситься информация о работе насоса, а также заносятся данные. Затем запускают отсчет времени в блоке временной задержки 13, после чего запускают насос на несколько периодов, шток при этом совершает возвратно-поступательное движение, как следствие - датчики усилия 3 и хода 4 штока начинают формировать сигналы. По истечении времени задержки, после того, как насос вошел в установившийся режим работы, автоматически или с дистанционного пульта оператора запускается режим измерения, и сигнал с датчика усилий 3 поступает на усилитель 8 и далее через мультиплексор 11, который осуществляет коммутацию имеющихся аналоговых сигналов, - на вход аналого-цифрового преобразователя 12, а с него - на порт микропроцессорного контроллера 17. В это же время сигнал с датчика положения 4 также поступает на вход микропроцессорного контроллера 17 и на вход блока запуска измерений 14. При этом датчик положения 4 установлен на штоке таким образом, чтобы синхронизирующий сигнал запуска измерения микропроцессорного контроллера 17 вырабатывался в блоке запуска измерений 14 только тогда, когда канатная подвеска находится в крайнем нижнем положении. По этому сигналу контроллер 17 начинает измерять время. Обработка постоянно поступающей в цикле измерения информации о времени и усилии осуществляется в контроллере 17 в соответствии с заданной программой, поступающей из программного блока управления 19. После прихода с датчика положения второго синхронизирующего сигнала по цепи датчик положения 4 - блок запуска измерений 14 - контроллер 17 - генератор 16 синусоидальных колебаний информация автоматически выводится на графический индикатор 22, заносятся в память оперативно-запоминающего устройства 20 все необходимые уровни нагрузок и единичная динамограмма. При этом развертка динамограммы по оси X осуществляется по сигналу с генератора синусоидальных колебаний 16, период колебаний которого соответствует периоду одного качания. На экране графического индикатора 22 отображается одиночная динамограмма (фиг. 2). Значения нагрузок в цифровом виде заносятся в протокол испытаний с фактическими нагрузками за период одного цикла. По полученной одиночной динамограмме в соответствии с программой, заданной программным блоком управления 19, автоматически прямо на скважине рассчитываются величина среднего дебита, утечки в клапанах насоса, производительность насоса.
Самое читаемое:
Инерционное звено первого порядка
инерционное звено автоматическое
регулирование
Современное
производство характеризуется непрерывным увеличением производительности
агрегатов, повышением качества выпускаемой продукции и снижением ее стоимости.
Большие скорости протекания производственных процессов и повышение требований к
точности их выдерживания привели к широкому ...