Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Нахождение параметров Kp, Ki и Kd для ПИД - регулятора с помощью блока Signal Constraints
Метод настройки регулятора системы управления основан на динамической оптимизации переходной характеристики h(t) системы: регулятор настраивается путем подбора его коэффициентов таким образом, чтобы переходная характеристика удовлетворяла заданным требованиям. В качестве таких требований используются ограничения, накладываемые на максимальное перерегулирование, время нарастания и длительность переходного процесса.
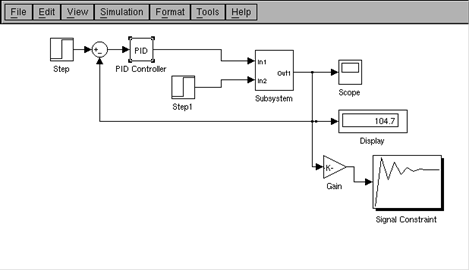
Автоматическая настройка регулятора основана на использовании блока Signal Constraints из раздела Simulink Response Optimization. Этот блок подключается к выходу системы. В его свойствах задаются допустимые границы для переходного процесса, из-за которых не должна выходить скорость двигателя. В командном окне MatLAB задаются начальные приближения коэффициентов ПИД - регулятора, и имена этих коэффициентов заносятся в список настроечных параметров (в окне блока Signal Constraints необходимо зайти в меню Optimization, пункт Tuned Parameters и добавить кнопкой Add параметры регулятора). После этого делается запуск процесса оптимизации. В результате определяются оптимальные для заданных границ коэффициенты. Начальные значения коэффициентов примем равными единицам.
 Р
Р
Рисунок 12 - Схема для определения оптимальных коэффициентов для заданных границ
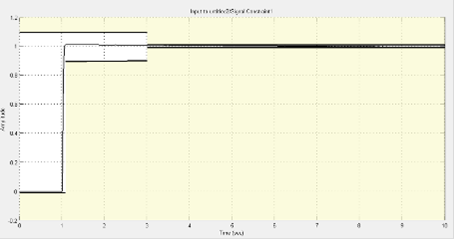
Рисунок 13 - Переходный процесс системы с ПИД- регулятором в блоке Signal Constraint
![]()
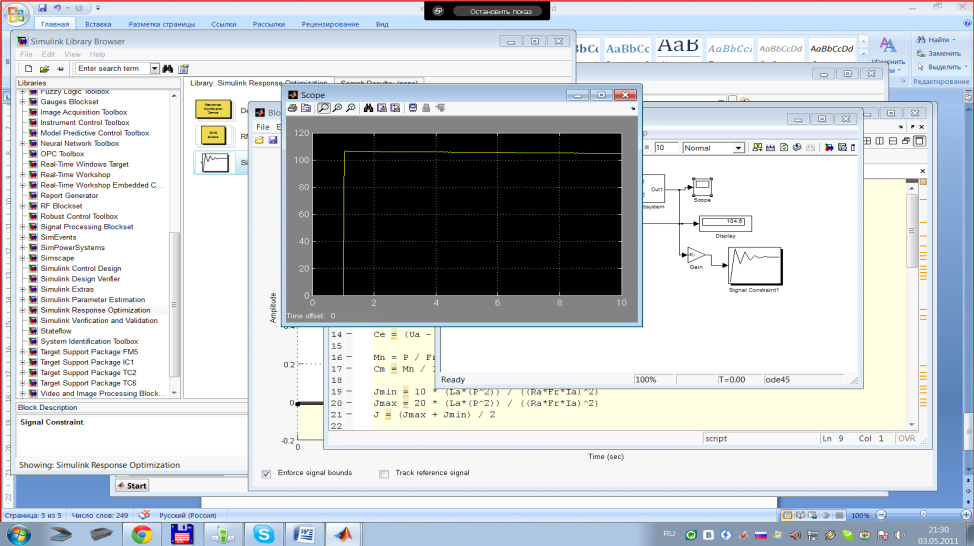
Рисунок 14 - Переходный процесс системы с ПИД- регулятором
Оптимальные коэффициенты для заданных границ ПИД - регулятора= 0,3733= -1,2792= 0,3733
Самое читаемое:
Автоматизация работы теплового насоса
В настоящее время при автоматизации процессов в
промышленности все более широкое распространение получают различные системы
автоматического управления.
Автоматическое управление в технике, совокупность действий,
направленных на поддержание или улучшение функционирования управляемого объекта
без непосредственного участия человека ...