Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Построение переходного процесса САР Смита
Для того чтобы построить переходный процесс построим дискретные модели.
1) y(i)=![]()
![]() * y( i-1) +
* y( i-1) + ![]()
![]() (U ( i-
(U ( i-![]()
![]() ) + W (i-
) + W (i-![]()
![]() ) )
) )
Где i=0,1…800
В качестве регулирующего блока рассмотрим ПИ - регулятор:
2) U(i) = ![]()
![]() (i) +
(i) + ![]()
![]() (i);
(i); ![]()
![]() (i) =
(i) = ![]()
![]() ;
;
![]()
![]() ;
; ![]()
![]() ;
; ![]()
![]()
) ![]()
![]() (i) = ε(i) -
(i) = ε(i) - ![]()
![]() ; ε(i) =
; ε(i) = ![]()
![]() ;
;
) ![]()
![]() ;
;
) ![]()
![]()
Моделируем САР при условии, что наша модель адекватна реальному объекту.
Рассчитываем все вышеперечисленные параметры. По полученным данным строим переходный процесс САР Смита при условии i=0,1…800.
График переходного процесса САР Смита представлен на рисунке.
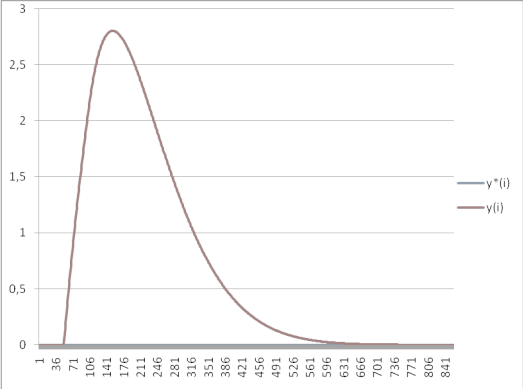
Рисунок: График переходного процесса САР Смита
Исследование устойчивости САР Смита
По полученному графику перехолного процесса можно судить о его сути, качестве регулирования аналогично тому что было сделано ранее.
В данном случае из графика мы видим, что процесс получился апериодический, максимальное динамическое отклонение равно 2,86 и время регулирования равно 617 секундам.
Самое читаемое:
Следящий электропривод
Автоматизация процессов управления различными
объектами связана с широким использованием следящих приводов. Следящие приводы
нашли применение во многих областях техники: в системах управления станками, в
системах управления манипуляторами, в моделирующих стендах, в системах
управления объектами вооружения и т. д.
Следящий электро ...