Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Додетекторное обнаружение
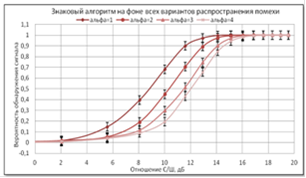
Рисунок 13 - Рабочая характеристика АО знакового алгоритма
Таблица 1. Результаты моделирования АО знакового алгоритма обнаружения
|
Знаковый алгоритм | ||||
|
h, дБ |
α=1 |
α=2 |
α=3 |
α=4 |
|
-3,98 |
0,005 |
0,001 |
0,003 |
0,004 |
|
2,04 |
0,019 |
0,018 |
0,008 |
0,011 |
|
5,56 |
0,147 |
0,053 |
0,047 |
0,038 |
|
8,06 |
0,396 |
0, 191 |
0,114 |
0,089 |
|
10,00 |
0,682 |
0,45 |
0,298 |
0, 195 |
|
11,58 |
0,9 |
0,706 |
0,515 |
0,432 |
|
12,92 |
0,972 |
0,894 |
0,745 |
0,655 |
|
14,08 |
0,997 |
0,976 |
0,901 |
0,849 |
|
15,11 |
1 |
0,996 |
0,97 |
0,945 |
|
16,02 |
1 |
0,999 |
0,993 |
0,983 |
|
16,85 |
1 |
1 |
1 |
0,996 |
|
17,60 |
1 |
1 |
1 |
1 |
|
18,30 |
1 |
1 |
1 |
1 |
|
18,94 |
1 |
1 |
1 |
1 |
|
19,54 |
1 |
1 |
1 |
1 |
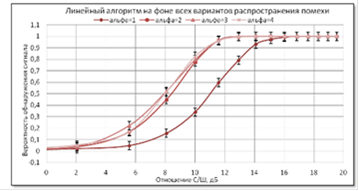
Рисунок 14 - Рабочая характеристика АО линейного алгоритма
Таблица 2. Результаты моделирования АО линейного алгоритма обнаружения
|
Линейный алгоритм | ||||
|
h, дБ |
α=1 |
α=2 |
α=3 |
α=4 |
|
-3,98 |
0,004 |
0,007 |
0,009 |
0,006 |
|
2,04 |
0,021 |
0,037 |
0,042 |
0,052 |
|
5,56 |
0,048 |
0,168 |
0,222 |
0,171 |
|
8,06 |
0,155 |
0,448 |
0,52 |
0,515 |
|
10,00 |
0,34 |
0,776 |
0,797 |
0,824 |
|
11,58 |
0,596 |
0,966 |
0,965 |
0,961 |
|
12,92 |
0,791 |
0,994 |
0,999 |
0,995 |
|
14,08 |
0,931 |
1 |
1 |
1 |
|
15,11 |
0,973 |
1 |
1 |
1 |
|
16,02 |
0,991 |
1 |
1 |
1 |
|
16,85 |
1 |
1 |
1 |
1 |
|
17,60 |
1 |
1 |
1 |
1 |
|
18,30 |
1 |
1 |
1 |
1 |
|
18,94 |
1 |
1 |
1 |
1 |
|
19,54 |
1 |
1 |
1 |
1 |
Самое читаемое:
Исследование системы управления цифрового исполнительного устройства фирмы Metso
Для
улучшения эксплуатационных качеств регулирующих клапанов они оснащаются
исполнительными механизмами с позиционером и ручным дублером привода.
Позиционеры являются комплектующими изделиями исполнительных механизмов. Они
предназначены для управления пневматическими поршневыми или
пружинно-мембранными исполнительными механизма ...