Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Шаговый двигатель
Шаговый двигатель - это электромеханическое устройство, которое преобразует электрические импульсы в дискретные механические перемещения. Шаговый двигатель внешне практически ничем не отличается от двигателей других типов. Чаще всего это круглый корпус, вал, несколько выводов
Однако шаговые двигатели обладают некоторыми уникальными свойствами, что делает порой их исключительно удобными для применения или даже незаменимыми. Достоинства шагового двигателя:
1. угол поворота ротора определяется числом импульсов, которые поданы на двигатель
2. двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны)
. прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность 3-5% от величины шага. Эта ошибка не накапливается от шага к шагу
. возможность быстрого старта/остановки/реверсирования
. высокая надежность, связанная с отсутствием щеток, срок службы шагового двигателя фактически определяется сроком службы подшипников
. однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи
. возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора
. может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов
Виды шаговых двигателей
Существуют три основных типа шаговых двигателей:
· двигатели с переменным магнитным сопротивлением
· двигатели с постоянными магнитами
· гибридные двигатели
В шаговом двигателе вращающий момент создается магнитными потоками статора и ротора, которые соответствующим образом ориентированы друг относительно друга. Статор изготовлен из материала с высокой магнитной проницаемостью и имеет несколько полюсов. Полюс можно определить как некоторую область намагниченного тела, где магнитное поле сконцентрировано. Полюса имеют как статор, так и ротор. Для уменьшения потерь на вихревые токи магнитопроводы собраны из отдельных пластин, подобно сердечнику трансформатора. Вращающий момент пропорционален величине магнитного поля, которая пропорциональна току в обмотке и количеству витков. Таким образом, момент зависит от параметров обмоток. Если хотя бы одна обмотка шагового двигателя запитана, ротор принимает определенное положение. Он будет находится в этом положении до тех пор, пока внешний приложенный момент не превысит некоторого значения, называемого моментом удержания. После этого ротор повернется и будет стараться принять одно из следующих положений равновесия.
Биполярные и униполярные шаговые двигатели
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием. Всего биполярный двигатель имеет две обмотки и, соответственно, четыре вывода (рис. 2а).
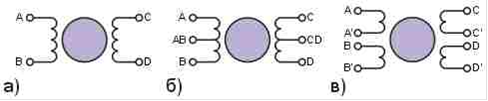
Рис. 2. Биполярный двигатель (а), униполярный (б) и четырехобмоточный (в).
Униполярный двигатель также имеет одну обмотку в каждой фазе, но от середины обмотки сделан отвод. Это позволяет изменять направление магнитного поля, создаваемого обмоткой, простым переключением половинок обмотки. При этом существенно упрощается схема драйвера. Драйвер должен иметь только 4 простых ключа. Таким образом, в униполярном двигателе используется другой способ изменения направления магнитного поля. Средние выводы обмоток могут быть объединены внутри двигателя, поэтому такой двигатель может иметь 5 или 6 выводов (рис. 2.б). Иногда униполярные двигатели имеют раздельные 4 обмотки, по этой причине их ошибочно называют 4-х фазными двигателями. Каждая обмотка имеет отдельные выводы, поэтому всего выводов 8 (рис. 2.в). При соответствующем соединении обмоток такой двигатель можно использовать как униполярный или как биполярный. Униполярный двигатель с двумя обмотками и отводами тоже можно использовать в биполярном режиме, если отводы оставить неподключенными. В любом случае ток обмоток следует выбирать так, чтобы не превысить максимальной рассеиваемой мощности.
Если сравнивать между собой биполярный и униполярный двигатели, то биполярный имеет более высокую удельную мощность. При одних и тех же размерах биполярные двигатели обеспечивают больший момент.
Момент, создаваемый шаговым двигателем, пропорционален величине магнитного поля, создаваемого обмотками статора. Путь для повышения магнитного поля - это увеличение тока или числа витков обмоток. Естественным ограничением при повышении тока обмоток является опасность насыщения железного сердечника. Однако на практике это ограничение действует редко. Гораздо более существенным является ограничение по нагреву двигателя вследствие омических потерь в обмотках. Как раз этот факт и демонстрирует одно из преимуществ биполярных двигателей. В униполярном двигателе в каждый момент времени используется лишь половина обмоток. Другая половина просто занимает место в окне сердечника, что вынуждает делать обмотки проводом меньшего диаметра. В то же время в биполярном двигателе всегда работают все обмотки, т.е. их использование оптимально. В таком двигателе сечение отдельных обмоток вдвое больше, а омическое сопротивление - соответственно вдвое меньше. Это позволяет увеличить ток в корень из двух раз при тех же потерях, что дает выигрыш в моменте примерно 40%. Если же повышенного момента не требуется, униполярный двигатель позволяет уменьшить габариты или просто работать с меньшими потерями. На практике все же часто применяют униполярные двигатели, так как они требуют значительно более простых схем управления обмотками. Это важно, если драйверы выполнены на дискретных компонентах. В настоящее время существуют специализированные микросхемы драйверов для биполярных двигателей, с использованием которых драйвер получается не сложнее, чем для униполярного двигателя. Например, это микросхемы L293E, L298N или L6202 фирмы SGS-Thomson, PBL3770, PBL3774 фирмы Ericsson, NJM3717, NJM3770, NJM3774 фирмы JRC, A3957 фирмы Allegro, LMD18T245 фирмы National Semiconductor.
Самое читаемое:
Следящий электропривод
Автоматизация процессов управления различными
объектами связана с широким использованием следящих приводов. Следящие приводы
нашли применение во многих областях техники: в системах управления станками, в
системах управления манипуляторами, в моделирующих стендах, в системах
управления объектами вооружения и т. д.
Следящий электро ...