Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Принципиальная схема устройства
В составе устройства используется микроконтроллер ATmega 8535, обладающий необходимым количеством портов ввода/вывода и прерываний. Для отображения информации используется жидкокристаллический индикатор LM016L, который содержит 2 строки по 16 символов, встроенный знакогенеретор.
В качестве двигателя выбран ДШИ-200-1, драйвер которого представляет собой четыре мощных транзисторных ключа, необходимых для коммутации обмоток шагового двигателя.
Питание осуществляется с помощью стабилизированного источника питания на 5В, рассчитанного на входное напряжение 7 12 В.
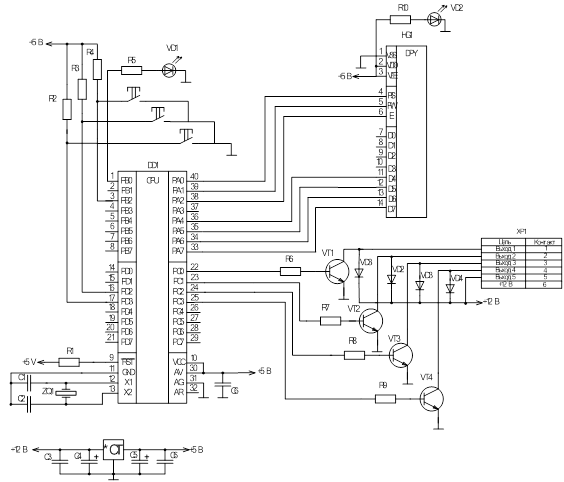
Рис. 3.1 - Принципиальная схема устройства
Самое читаемое:
Исследование наноструктурированной поверхности на АСМ Solver HV
Целью
курсовой работы является изучение принципов сканирующей зондовой микроскопии,
получение навыков работы на АСМ SOLVERHV.
Преимущество
АСМ SOLVER HV состоит в том, что система позволяет проводить параллельно с
изучением топографии поверхности исследуемого образца физические, магнитные,
электрические и электростатические хара ...