Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Нахождение передаточной функции замкнутой системы.
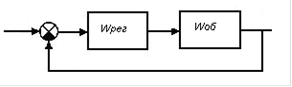
Рис. 3. Структурная схема замкнутой системы.
Сначала найдем передаточную функцию разомкнутой системы: ![]() , где
, где ![]() - передаточная функция объекта,
- передаточная функция объекта, ![]() - передаточная функция регулятора, которая равна:
- передаточная функция регулятора, которая равна:
![]() .
.
![]()

5). Замкнутая ВЧХ Р(w):

На рисунке 1 показан график P(w)

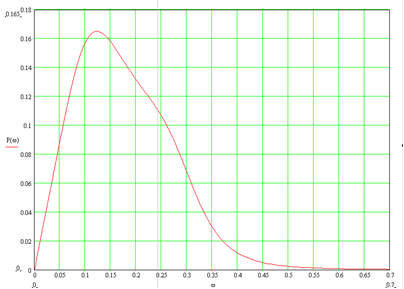
Рис. 1.
Самое читаемое:
Разработка микропроцессорной системы на основе процессора MC68000
микропроцессор память блок шина
1.
Разработать
микропроцессорную систему на базе процессора MC68000.
2.
Разработать и нарисовать
структурную и принципиальную схему МПС. Произвести подключение шины адреса,
данных и управления к соответствующим блокам на схеме. Сформировать блок
устройства памяти (ОЗУ и ПЗУ) и подключить е ...
www.techstages.ru : Все права защищены! 2026