Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Расчет ДН МПИ в H- плоскости
Расчёт ДН в H-плоскости производится по следующим формулам:
![]()
![]()
![]()
![]()
![]() ;
; ![]()
![]()
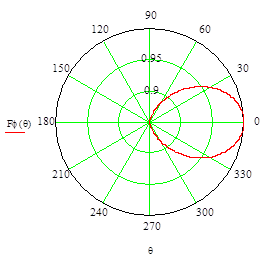
Рисунок 4.3 - Диаграмма направленности МПИ в Н-плоскости
Самое читаемое:
Автоматизированное управление электронной проходной
Система контроля и управления доступом (СКУД) предназначена для
выполнения комплекса мероприятий, направленных на ограничение и
санкционирование доступа сотрудников на территорию предприятия, в помещения и
зоны ограниченного доступа. Оборудование рассчитано на количество пользователей
системы контроля и управления доступом электронн ...
www.techstages.ru : Все права защищены! 2026