Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Алгоритм работы микропроцессорной системы управления
Блок-схема алгоритма работы системы управления представлена на рисунке 13.
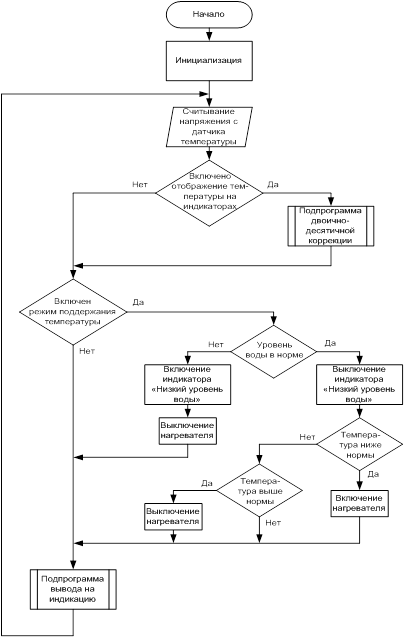
Рисунок 13 - Блок-схема алгоритма работы микропроцессорной системы управления
На рисунке 14 приведена блок-схема алгоритма обработки прерываний. В данной микропроцессорной системе возможны 5 видов прерываний: прерывание от модуля CCP1, прерывание от таймера TMR2, внешнее прерывание по входу INT, прерывание по изменению уровня на входах <RB4:RB7> и прерывание от приемника USART.
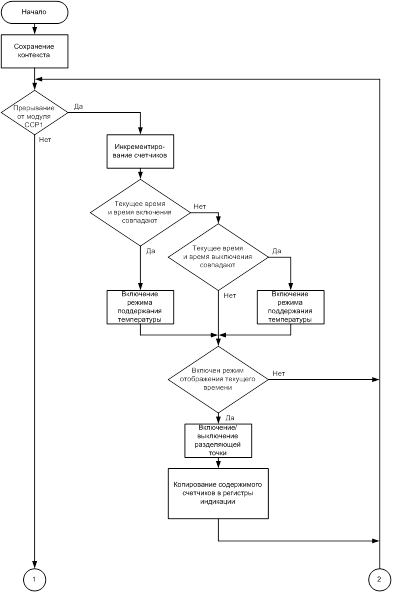
Рисунок 14 - Блок-схема алгоритма обработки прерываний
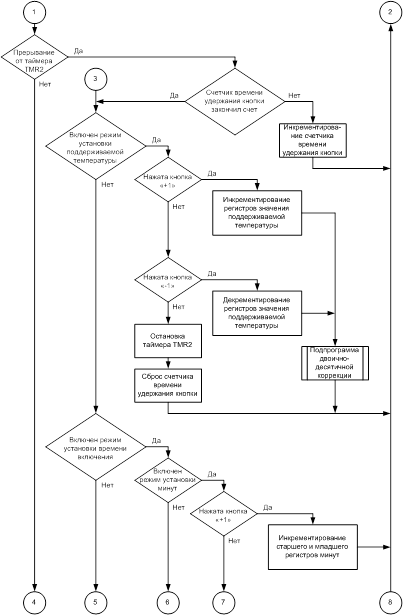
Рисунок 14 - Блок-схема алгоритма обработки прерываний (продолжение)
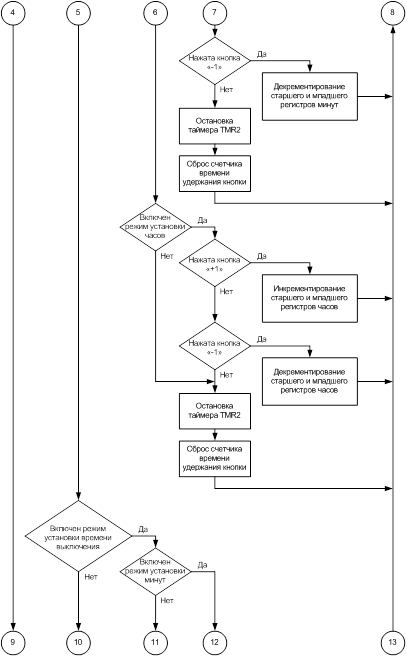
Рисунок 14 - Блок-схема алгоритма обработки прерываний (продолжение)
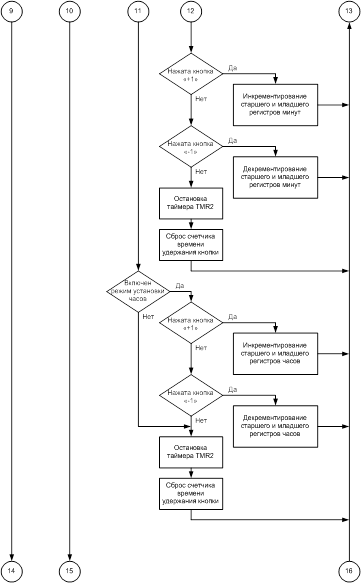
Рисунок 14 - Блок-схема алгоритма обработки прерываний (продолжение)
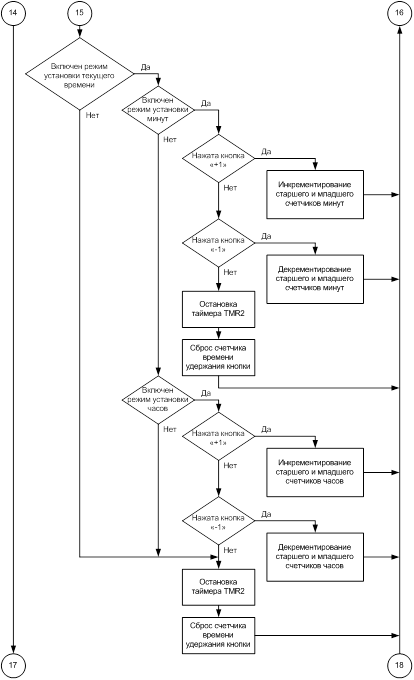
Рисунок 14 - Блок-схема алгоритма обработки прерываний (продолжение)
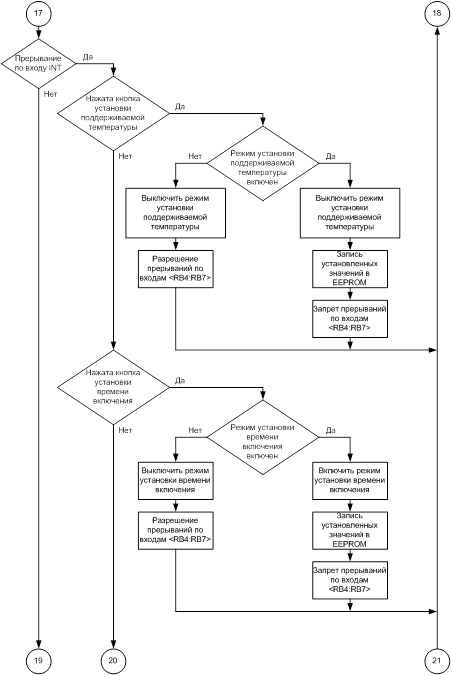
Рисунок 14 - Блок-схема алгоритма обработки прерываний (продолжение)
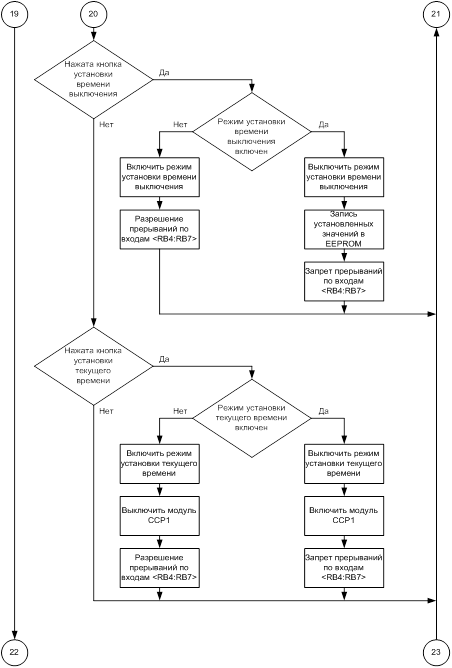
Рисунок 14 - Блок-схема алгоритма обработки прерываний (продолжение)
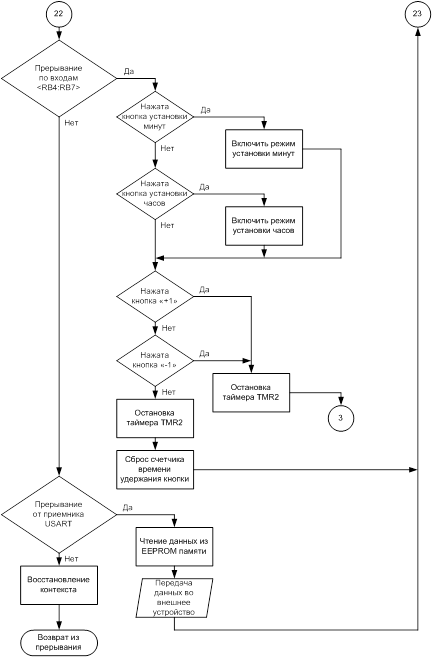
Рисунок 14 - Блок-схема алгоритма обработки прерываний (окончание)
Самое читаемое:
Непрерывный и квантованный объекты управления в пространстве состояний
1. Задана линейная стационарная дискретная система (параметры
непрерывных динамических звеньев в таблице 1 Приложения 2).
и .
Рисунок 1. Структурная схема линейной стационарной дискретной системы
. Составить описание непрерывного объекта управления в пространстве
состояний.
. Выбрать период дискретности и ...