Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Логический синтез цифровых устройств
.1. Объект представляет собой техническое устройство, в которое поступают различные детали. Имеются 5 датчиков, которые определяют соответствие деталей ("да"-"нет") некоторым параметрам (размер, форма, цвет, конфигурация и т.п.). В зависимости от комбинации сигналов датчиков f(X5,X4,X3,X2,X1) детали сортируются и направляются в разные бункеры и подсчитываются.
.2. Рассмотрим работу одного бункера. При поступлении детали в позицию сортировки вырабатывается сигнал ГОТОВ, который равен "1" все время нахождения детали в этой позиции. Для проектируемой схемы сигнал ГОТОВ и сигналы датчиков Х5,Х4,Х3,Х2,Х1 - внешние. По фронту сигнала ГОТОВ запускается одновибратор. Через время задержки t1 (на срабатывание датчиков) одновибратор формирует синхроимпульс длительностью t2. По сигналу "1" на выходе комбинационной схемы и синхроимпульсу детали направляются в соответствующий бункер. Схема счетчика осуществляет подсчет деталей, поступающих в бункер, и при достижении заданного числа N выдает сигнал о заполнении бункера.
.3. Структурная схема цифрового устройства, которое требуется реализовать в ходе работы, представлена на рисунке 1. На рисунке 1 приняты обозначения: G1 и G2 - одновибраторы.
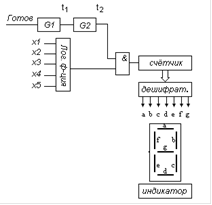
Рис. 1. Структурная схема цифрового устройства
. ТЕХНИЧЕСКОЕ ЗАДАНИЕ
.1. В соответствии с таблицей состояний (см. таблицу 1) минимизировать логическую функцию и синтезировать ее в заданном базисе (таблица 2).
Таблица 1.
|
№ |
X5 |
X4 |
X3 |
X2 |
X1 |
F |
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
1 |
0 |
0 |
0 |
0 |
1 |
0 |
|
2 |
0 |
0 |
0 |
1 |
0 |
0 |
|
3 |
0 |
0 |
0 |
1 |
1 |
0 |
|
4 |
0 |
0 |
1 |
0 |
0 |
0 |
|
5 |
0 |
0 |
1 |
0 |
1 |
X |
|
6 |
0 |
0 |
1 |
1 |
0 |
0 |
|
7 |
0 |
0 |
1 |
1 |
1 |
X |
|
8 |
0 |
1 |
0 |
0 |
0 |
0 |
|
9 |
0 |
1 |
0 |
0 |
1 |
X |
|
10 |
0 |
1 |
0 |
1 |
0 |
0 |
|
11 |
0 |
1 |
0 |
1 |
1 |
0 |
|
12 |
0 |
1 |
1 |
0 |
0 |
0 |
|
13 |
0 |
1 |
1 |
0 |
1 |
1 |
|
14 |
0 |
1 |
1 |
1 |
0 |
0 |
|
15 |
0 |
1 |
1 |
1 |
1 |
X |
|
16 |
1 |
0 |
0 |
0 |
0 |
0 |
|
17 |
1 |
0 |
0 |
0 |
1 |
1 |
|
18 |
1 |
0 |
0 |
1 |
0 |
0 |
|
19 |
1 |
0 |
0 |
1 |
1 |
0 |
|
20 |
1 |
0 |
1 |
0 |
0 |
0 |
|
21 |
1 |
0 |
1 |
0 |
1 |
1 |
|
22 |
1 |
0 |
1 |
1 |
0 |
0 |
|
23 |
1 |
0 |
1 |
1 |
1 |
1 |
|
24 |
1 |
1 |
0 |
0 |
0 |
0 |
|
25 |
1 |
1 |
0 |
0 |
1 |
X |
|
26 |
1 |
1 |
0 |
1 |
0 |
0 |
|
27 |
1 |
1 |
0 |
1 |
1 |
0 |
|
28 |
1 |
1 |
1 |
0 |
0 |
1 |
|
29 |
1 |
1 |
1 |
0 |
1 |
1 |
|
30 |
1 |
1 |
1 |
1 |
0 |
1 |
|
31 |
1 |
1 |
1 |
1 |
1 |
1 |
Таблица 2.
|
Вариант |
Базис логической функции и дешифратора |
Базис счетчика |
Тип индикатора |
|
F |
И, ИЛИ, НЕ |
К555ТВ9 |
АЛС342А |
2.2. Спроектировать одновибратор на интегральных таймерах для заданного времени задержки t1 и длительности импульса t2 (см. таблицу 3 и рис. 2).
Таблица 3.
|
Вариант |
T1, c |
T2, мc |
Микросхема |
|
7 |
0,12 |
10 |
К555АГ3 |
2.3. Синтезировать в заданном элементном базисе счетчик с заданным модулем счета N и направлением счета (см. таблицу 4 и таблицу 2).
Таблица 4.
|
Вариант |
Модуль счета |
Направление счета |
|
0 |
5 |
прямой |
логический цифровой устройство одновибратор счетчик
2.4. Разработать дешифратор для индикации показаний счетчика при заданном типе индикатора (см. таблицу 2).
2.5. Выполнить чертеж разработанной схемы.
- Синтез логического устройства
- Проектирование одновибратора
- Синтез счетчика
- Разработка дешифратора при заданном типе индикатора
Самое читаемое:
Задачи исследования защищённости информации от утечки по каналу ПЭМИН
Электромагнитные поля, возникающие как побочный продукт работы
устройств обработки информации, и вызываемые этими полями наведенные напряжения
называют побочными электромагнитными излучениями и наводками (ПЭМИН). Задача
анализа опасности ПЭМИН с позиций возможности утечки информации является весьма
сложной и трудоемкой. Для е ...