Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Построение переходных характеристик объекта регулирования по основной (угол поворота) и вспомогательным регулируемым величинам (скорость вращения вала двигателя и ток якоря)
Структурная схема обобщенного объекта управления изображена на рисунке 3.1:
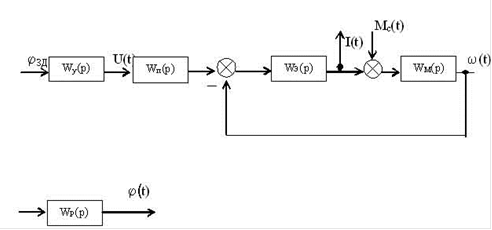
Рис.3.1 Структурная схема объекта управления
С учетом исходных данных и вычисленных значений постоянных времени имеются передаточные функции:
WУ (р) =64; WП (р) = 3,85/ (0,007р+1); WЭ (р) = 1/ (0,0098р+1);
WМ (р) = 1/ (0,52р+1); WР (р) = 10/р;
Анализ схемы 3.1 с вышеприведенными передаточными функциями в программном пакете Simulc дал следующие временные характеристик:
Текст программы:
-step
-gain, 1
-tfa1, 2
4-suma, 3, 7
-tfa1, 4
-suma, 5, 1
-tfa1, 6
-tfa1, 7= 7= 5
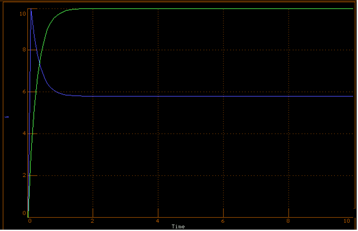
Рис.3.2 Временные характеристики
Числовые значения временных характеристик приведены в таблице:
|
t |
0 |
0,01 |
0,2 |
0,4 |
0,8 |
1,2 |
1,6 |
2 |
4 |
|
ω |
0 |
37,01 |
64,51 |
96,01 |
117,36 |
121,95 |
122,92 |
123,14 |
123,2 |
|
i |
0 |
212,72 |
184,2 |
151,45 |
129,26 |
124,54 |
123,48 |
123,25 |
123,2 |
|
t |
5,8 |
8 |
10 |
|
φ |
123,2 |
123,2 |
123,2 |
|
i |
123,2 |
123,2 |
123,2 |
Самое читаемое:
Испытания схем увязки САУТ-ЦМ и МПЦ в лаборатории
Главной задачей решаемой на железнодорожном транспорте всеми его
службами, хозяйствами, техническими и организационными мероприятиями является
обеспечение непрерывного, нормального (штатного) протекания основного
технологического процесса (ТП) движения поездов. Движение поездов - это
комплексный технологический процесс, состоящий из ...