Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Синтез контура регулирования тока
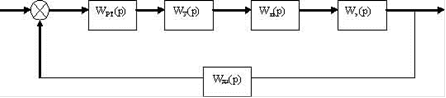
Рис.5.1 Контур регулирования тока
Расчетная модель объекта в контуре тока
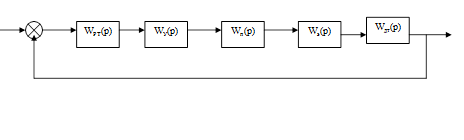
Рис.5.2 Расчетная модель объекта
![]()

тогда ![]() , где δ = Тп+Тя=0,0168
, где δ = Тп+Тя=0,0168
Выбор метода синтеза и расчет параметров настройки регулятора тока
Так как постоянные времени Тп и Тя соизмеримы, то в соответствии с методом модального оптимума необходимо применять интегральный регулятор: ![]() .
.
Рис.5.3
Запишем передаточную функцию разомкнутой системы:
![]()
Запишем соответствующую передаточную функцию замкнутой системы:
![]()
Обозначим: К*=b0, Тиδ=b2, Ти=b1.
Воспользовавшись условием оптимизации b12=2b0b2, получим Ти=2К*δ. Подставим полученное выражение для расчета постоянной интегрирования в передаточную функцию замкнутой системы:
![]() .
.
Вывод эквивалентной передаточной функции контура тока
Для дальнейшего использования в выборе регуляторов других контуров представим данную передаточную функцию в виде эквивалентной 1-го порядка: ![]() , где Тэкв=2δ=2*0,0168=0,0336.
, где Тэкв=2δ=2*0,0168=0,0336.
Построение переходных процессов в контуре тока и эквивалентном контуре тока при обработке задающего воздействия
Для построения переходных процессов воспользуемся программой Simulk.
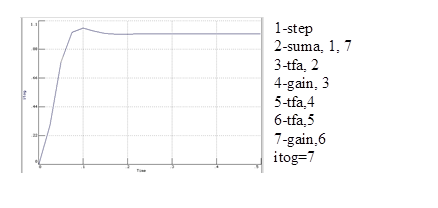
Рис.5.4 Переходной процесс в реальном конуре тока
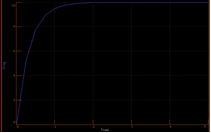
Рис.5.5 Переходной процесс в эквивалентном контуре тока
Самое читаемое:
Исследования свойств гексагональных кодирующих коллиматоров для однофотонной эмиссионной томографии
Цель
работы: Численно исследовать аппаратные функции кодирующих коллиматоров,
построенных на базе псевдослучайных последовательностей, расширенных
псевдослучайных последовательностей, троичных последовательностей, расширенных
троичных последовательностей. Оптимизировать скорость расчета аппаратных
функций гексагональных кодирующих ...