Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Расчетная модель объекта в контуре скорости без учета внутренней обратной связи
Рис.5.7 Расчетная модель объекта
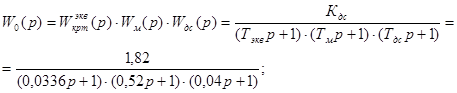
Так как Тэкв - это расчетная величина, то δ=Тэкв+Тдс=0,0336+0,04=0,0736, тогда
![]()
Выбор метода синтеза и расчет параметров настройки регулятора скорости
В соответствии с методом модального оптимума применяем ПИ-регулятор. Значение постоянной интегрирования Ти выберем из условия компенсации большой инерционности Тм, т.е. положим Ти=Тм, тогда 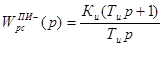
Рис.5.8
Запишем передаточную функцию разомкнутой системы:
![]()
Запишем соответствующую передаточную функцию замкнутой системы:

Воспользуемся условием оптимизации: Ти2=2КрКдсТиδ, тогда Ти=2КрКдсδ отсюда следует, что Кр=Тм/2Кдсδ.
Подставляем полученное выражение в передаточную функцию замкнутой системы:
![]()
Вывод эквивалентной передаточной функции контура скорости
Для дальнейшего использования в выборе регуляторов других контуров представим данную передаточную функцию в виде эквивалентной 1-го порядка: ![]() , где Тэкв=2δ=2*0,0736=0,1472.
, где Тэкв=2δ=2*0,0736=0,1472.
Построение переходных процессов в контуре скорости без учета внутренней обратной связи, с учетом внутренней обратной связи и эквивалентном контуре при отработке задающего воздействия
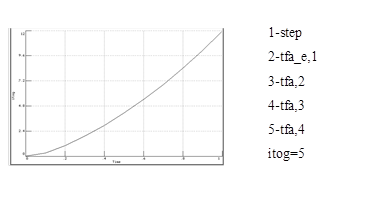
Рис.5.8 Переходной процесс в контуре скорости без учета внутренней обратной связи
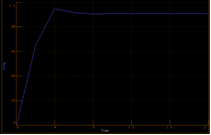
Рис.5.9 Переходной процесс в контуре скорости с учетом внутренней обратной связи
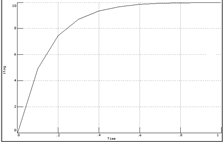
Рис.5.10 Переходной процесс в эквивалентном контуре скорости
Определение прямых показателей качества переходных процессов
Переходные процессы в скорректированной АСР изображены на рис.5.8, 5.9, 5.10.
Для анализа качества скорректированной автоматической системы регулирования скорости определим прямые оценки качества для переходного процесса основной регулируемой величины wt):
1. Перерегулирование ![]() y переходного процесса скорректированной системы из графика:
y переходного процесса скорректированной системы из графика: ![]() y=4,6%.
y=4,6%.
. Время регулирования находим из графика: tp=0,5 с.
Время нарастания: tн=0,3 c.
Самое читаемое:
Мониторинг сигналов в телекоммуникациях
Данная
курсовая работа на тему "Мониторинг сигналов в телекоммуникациях".
Телекоммуникация и сетевые технологии в наше время являются неотъемлемой частью
мировой цивилизации, так как являются самыми востребованными ресурсами.
В
условиях многократного увеличения информационных потоков трудно представить
сф ...