Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Классификация и общие принципы
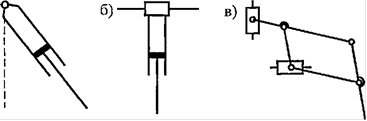
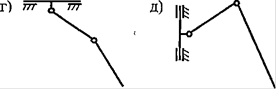
Рис. 5. Схемы шагающих движителей: телескопическая (а), ортого- нальнальная (б), пантографная (в), «лошадиная» (г), инсектоморфная (д)
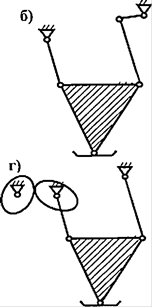
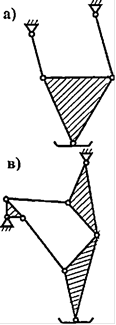
Рис. 6. Цикловые механизмы шагания: 4-х звенный (а); 4-х звенный с измененяемым положением оси коромысла (б); 6-ти»звенный (в); 4-х звенный с корректором закона вращения кривошипа (г)
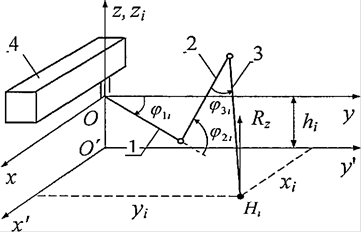
Рис. 7. Кинематическая схема инсектоморфного механизма шагания:
, 2, 3 - звенья механизма шагания, 4 - корпус машины
Самое читаемое:
Конструкторское проектирование усилителя мощности звуковой частоты
Разрабатываемое изделие - стереоусилтель УМ55-101С, далее просто
стереоусилитель, предназначено для усиления сигнала звуковой частоты. Может
агрегатироваться сразличными видами акустических систем, с максимальной
выходной мощностью не менее 60 Вт на канал.
Изделие может эксплуатироваться в условиях категории исполнения УХЛ 4.2.
...