Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Структурные схемы следящего электропривода
Для получения структурной схемы электродвигателя используем две передаточные функции: электрическую и механическую.
следящий электропривод схема
Рис.4.1 Структурная схема электродвигателя с выделением электрической и механической части
В схеме на рисунке 4.1 ![]() - передаточная функция электрической части двигателя,
- передаточная функция электрической части двигателя, ![]() - передаточная функция механической части двигателя в изображениях по Лапласу при нулевых начальных условиях.
- передаточная функция механической части двигателя в изображениях по Лапласу при нулевых начальных условиях.
Из системы уравнений (4.6) видно, что
 (4.14)
(4.14)
![]()
![]() (4.15)
(4.15)
Приведем передаточные функции (4.14) и (4.15) к стандартному виду. Для этого разделим и числитель и знаменатель дроби на ![]() , тогда получим:
, тогда получим:
 (4.16)
(4.16)
Введем следующие обозначения
 (4.17)
(4.17)
![]()
![]() (4.18)
(4.18)
где ![]()
![]() - постоянная времени электрической части двигателя.
- постоянная времени электрической части двигателя.
Тогда передаточная функция (4.16) принимает типовой вид:
![]()
![]() (4.19)
(4.19)
Рассмотрим передаточную функцию ![]() (4.15), которая уже имеет типовой вид
(4.15), которая уже имеет типовой вид
![]()
![]() (4.20)
(4.20)
Введем следующие обозначения:
![]()
![]() (4.21)
(4.21)
С учетом проведенных преобразований структурная схема двигателя примет следующий вид
Рис. 4.2 Структурная схема электродвигателя
Рис.4.3 Преобразованная структурная схема электродвигателя
Используя правила преобразования структурных схем, сделаем обратную связь по скорости единичной.
Рис. 4.4 Структурная схема двигателя с единичной обратной связью
Найдем передаточную функцию ![]()
![]() , используя формулу замыкания:
, используя формулу замыкания:
![]()
![]() (4.22)
(4.22)
Обозначим ![]()
![]()
Тогда получим
Раскроем скобки в знаменателе дроби:
 (4.23)
(4.23)
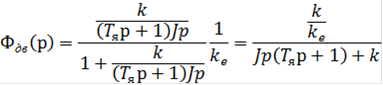
Приведем передаточную функцию ![]()
![]() к типовому виду, для этого разделим числитель, и знаменатель дроби на k :
к типовому виду, для этого разделим числитель, и знаменатель дроби на k :
![]()
![]() (4.24)
(4.24)
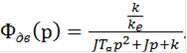
Тогда передаточная функция двигателя (4.24) электродвигателя с приведенным на его вал моментом инерции J нагрузки и c учетом того, что корни знаменателя при всех численных значениях являются действительными числами , принимает следующий вид:
Самое читаемое:
Автоматизированное управление электронной проходной
Система контроля и управления доступом (СКУД) предназначена для
выполнения комплекса мероприятий, направленных на ограничение и
санкционирование доступа сотрудников на территорию предприятия, в помещения и
зоны ограниченного доступа. Оборудование рассчитано на количество пользователей
системы контроля и управления доступом электронн ...