Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Архитектура
Шагающая машина состоит из следующих основных частей: корпуса и систем электроснабжения, передвижения, управления, информации и связи с супервизором. Система энергоснабжения обеспечивает энергией все системы робота; система передвижения выполняет основную задачу - работу механизма шагания. Система управления стабилизирует положение корпуса робота в пространстве, обеспечивает движение по намеченному маршруту с перешагиванием или обходом препятствий, управляет ногами. Информационная система снабжает систему управления данными об окружающей среде. Она формирует сигналы управления приводами ног, осуществляет сбор информации о состоянии шагающего устройства, формирует стереотипы походок и корректирует их в зависимости от неровности поверхности пола, поддерживает проектное положение корпуса робота.
Общая архитектура представляет собой следующую схему: персональный компьютер, под управлением ОС Windows XP, подключен по каналу связи к группе контроллеров. Контроллеры должны быть объединены в сеть. Каждый контроллер в свою очередь управляет исполнительными механизмами и получает сигналы с датчиков. Схема общей архитектуры приведена на рис. 13.
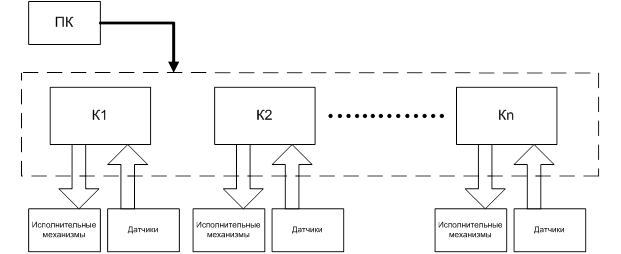
Рис13. Общая архитектура
Самое читаемое:
Анализ прохождения детерминированного сигнала через линейную цепь с постоянными параметрами
Нахождение
корреляционной функции для входного сигнала, сдвинутого на на
интервале
При
обработке сигналов часто приходится сравнивать сигнал со смещёнными во времени
копиями этого сигнала, а также другими сигналами. О степени связи сигнала со
смещёнными копиями можно судить по корреляционным функциям. Для вещественного
сигнал ...