Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Структура программного комплекса
Поскольку основное назначение шагающих машин - передвижение по сильно пересеченной местности, управление ими обязательно должно быть адаптивным. В системе управления при этом выделяют обычно следующие 3 уровня управления:
) нижний, уровень - управление приводами степеней подвижности ног;
) уровень - построение походки, т.е. координации движений ног, со стабилизацией при этом положения корпуса машины в пространстве;
) уровень - формирование типа походки, направления и скорости движения, исходя из заданного маршрута в целом.
Первый и второй уровни реализуются автоматически, а третий уровень осуществляется с участием супервизора.
Для реализации этих принципов управления был создан соответствующий программный комплекс. Программный комплекс состоит из отладочной утилиты - программы-монитора и демонстрационной программы.
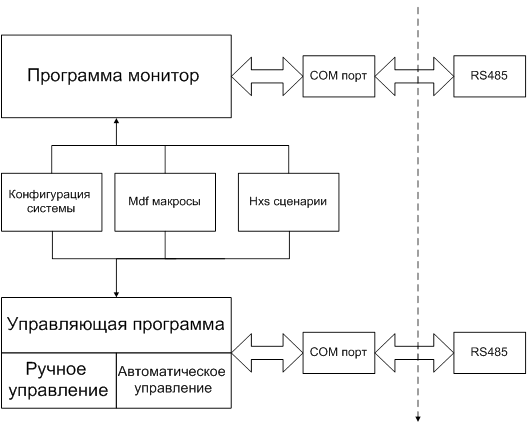
Рис. 20 Структурная схема программного комплекса
Самое читаемое:
Микросхема радиомодема норвежской фирмы CHIPCON
Быстро
развивающийся технический прогресс предъявляет с каждым днем все большие
требования к качеству производственных процессов. Одной из основных задач в
деле достижения высочайших показателей качества производства, является четкий и
быстрый контроль, а затем автоматизированная обработка данных о протекании
производственного проц ...