Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Анализ и синтез систем автоматического регулирования
Цель настоящей работы - выбор и обоснование типов регуляторов положения, скорости и тока, а также расчет параметров настройки этих регуляторов. Для синтеза автоматической системы будем использовать метод поконтурной оптимизации с использованием методов модального и симметричного оптимума.
При функциональном проектировании автоматических систем чаще всего применяют методы теории автоматического управления. Автоматическая система состоит из ряда технических устройств, обладающих определенными функциональными и динамическими свойствами. Для их описания и изучения автоматическую систему представляют некоторой совокупностью элементов, наделенных соответствующими свойствами.
Реальные технические объекты описываются нелинейными дифференциальными и алгебраическими уравнениями. Но поскольку на начальной ступени проектирования решают задачи предварительной оценки технических решений и прогнозирования, то для этих целей вполне обоснованно можно применять сравнительно простые математические модели. В этой связи нелинейные уравнения математической модели подвергают линеаризации.
Описание автоматических систем существенно упрощается при использовании методов операционного исчисления. Используя преобразование Лапласа, линейное дифференциальное уравнение приводят к алгебраическому уравнению с комплексными переменными.
В настоящей работе в качестве объекта регулирования
рассматривается электромеханический привод (рис.1). Назначение привода -
осуществление поворота выходного вала на некоторый заданный угол ![]() .
.
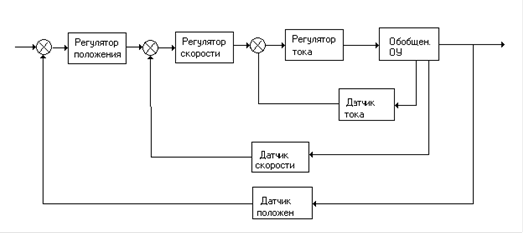
Рис.1. Упрощенная функциональная схема электропривода.
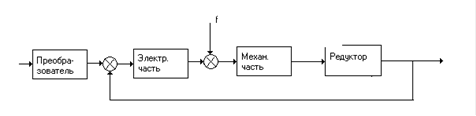
Рис.2. Функциональная схема обобщенного ОУ
При проектировании будем рассматривать математическую линеаризованную модель объекта. Каждому звену объекта поставим в соответствие передаточную функцию W (p), полученную из переходной функции y (t) звена.
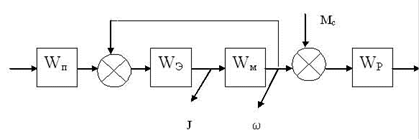
Рис.3. Структурная схема объекта регулирования.
Таким образом, исходным данным к работе является структурная схема системы (рис.3.) со следующими известными передаточными функциями:
Wп =KП - передаточная функция преобразователя;
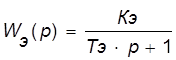 -
передаточная функция электрической части двигателя;
-
передаточная функция электрической части двигателя;
 -
передаточная функция механической части двигателя;
-
передаточная функция механической части двигателя;
 -
передаточная функция редуктора;
-
передаточная функция редуктора;
Wдп =Кдп - передаточная функция датчика положения;
Wдт= Кдт - передаточная функция датчика тока;
 -
передаточная функция датчика скорости.
-
передаточная функция датчика скорости.
Основной регулируемой величиной в системе является угол поворота выходного вала привода t). Вспомогательные регулируемые величины: угловая скорость вращения вала двигателя wt) и ток в обмотке якоря I (t).
- Анализ и синтез АСР
- Постановка задачи анализа
- Основные положения метода модального оптимума
- Основные положения синтеза систем методом симметричного оптимума
- Построение переходных характеристик объекта регулирования по основной (угол поворота) и вспомогательным регулируемым величинам (скорость вращения вала двигателя и ток якоря)
- Построение амплитудной и амплитудно-фазовой частотных характеристик объекта регулирования по основной регулируемой величине
- Анализ устойчивости системы
- Синтез контура регулирования тока
- Определение прямых показателей качества настройки регулятора тока
- Расчетная модель объекта в контуре скорости без учета внутренней обратной связи
- Синтез контура положения
- Сравнительный анализ качества синтезированной и не корректированной систем регулирования
Самое читаемое:
Исследование устойчивости алгоритмов приема к изменению помехи
При реализации процедур обнаружения или различения сигналов
результатом обработки должно быть принятие соответствующего решения. Так, в
случае обнаружения необходимо принять решение относительно того, присутствует
ли в сигнале , поступающем на вход устройства обработки, полезный сигнал или же представляет собой только
помеху. При ...