Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Расчет настроечных параметров Kp и Ki для П-, И- и ПИ- регуляторов
![]() ; (31)
; (31)
![]() ; (32)
; (32)
![]() ; (33)
; (33)
где - варьируемый параметр пропорциональный степени устойчивости; - степень устойчивости.
Как следует из формулы (33), если принять степень устойчивости равной величине , то получится ПИ-регулятор. Путем варьирования величины и в формулах (31) и (32), подбирается оптимальный переходный процесс.
Если величину ![]() принять равной нулю, то переходный процесс должен быть апериодическим. В этом случае значение выбирается таким, чтобы коэффициент был неотрицательным. Таким образом, определяются коэффициенты ПИД - регулятора.
принять равной нулю, то переходный процесс должен быть апериодическим. В этом случае значение выбирается таким, чтобы коэффициент был неотрицательным. Таким образом, определяются коэффициенты ПИД - регулятора.
Для нахождения параметров ПИ - регулятора используется программа, текст которой имеет вид:
tp = 0.5;= 3/tp;= 0;= (mu*mu + 3*n*n - a2)/b0;Kp < 0 = (mu*mu + 3*n*n - a2)/b0;= mu + 0.01;= (mu*mu*n + n^3)/b0;
Kp
= 2,6276= 17,6364
![]()
![]()
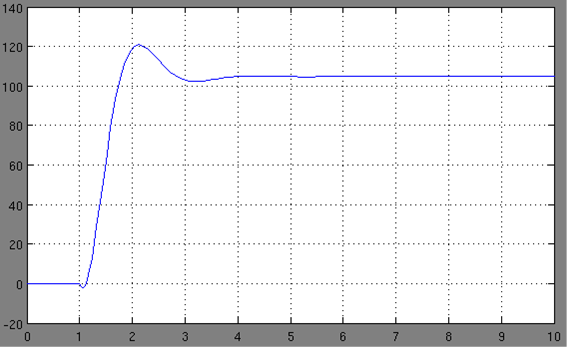
Рисунок 10 - Переходный процесс системы с ПИ - регулятором
Для нахождения параметров ПИД - регулятора используется программа, текст которой имеет вид:
tp = 0.5;= 3/tp;= (3*n - a1)/b0;Kd <0=(3*n - a1)/b0;= n + 0.1;= 0;= (mu*mu + 3*n*n - a2)/b0;Kp < 0 = (mu*mu + 3*n*n - a2)/b0;= mu + 0.01;= (mu*mu*n + n^3)/b0;
= 2,6276= 17,6364
Kd = 0,0003
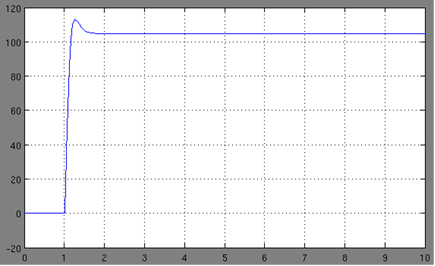
![]()
Рисунок 11 - Переходный процесс системы с ПИД - регулятором
Самое читаемое:
Многоканальные системы передачи
ним относятся: возможность передачи всех видов аналоговых
и дискретных сигналов; простое объединение, разделение и транзит передаваемых
сигналов; возможность взаимодействия ЦСП с аналоговыми системами, высокая
помехоустойчивость; малая зависимость качества передачи от длины линии связи;
стабильность параметров каналов ЦСП; высокие техни ...