Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Постановка задачи управления
В теории управления, как уже отмечалось, имеют дело с математическими моделями реальных процессов, которые всегда лишь приближенно отражают те черты реального процесса, которые важны в контексте конкретного исследования.
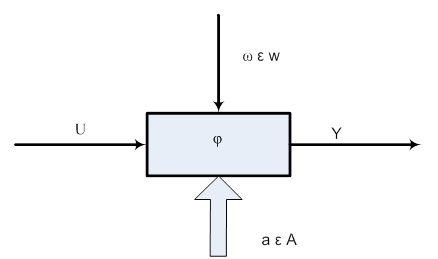
Выбранную математическую модель называют объектом управления или просто объектом и для удобства прибегают к графическому его изображению в виде блока с входом u и выходом y:

При таком структурном представлении объект характеризуется оператором вход - выходного соответствия y, то есть оператором, устанавливающим связь между множествами входных и выходных воздействии:
![]()
Обычно вход объекта u называют управляющим воздействием или управлением, а его выход y - выходным воздействием или управляемой координатой.
В линейной теории управления, оператор y предполагается линейным. Это означает, что для любых чисел α1, α2 и произвольных входов u1, u2 выполняется следующие соответствие:
![]()
Перейдем к описанию постановки задачи управления, которую иногда называют задачей стабилизации. Суть задачи состоит в выборе такого управления u, при которой выход объекта y, совпадает с заранее предъявленной функцией времени y*, вырабатывающей требования к характеру изменения выхода объекта.
Функция, y* (t) называется задающим воздействием или просто заданием. Задача управления усложняется влиянием на объект управления внешних воздействий - воздействий двух типов: координатного ω (t) и операторного а (t). Под влиянием этих воздействий, зачастую полностью неконтролируемых, взаимосвязь между входом и выходом объекта становится неоднозначной и неопределенной.
Следует отметить принципиальное различие в характере влияния на объект возмущений координатного и операторного типов.
Для объяснения представим объект управления следующей схемой:
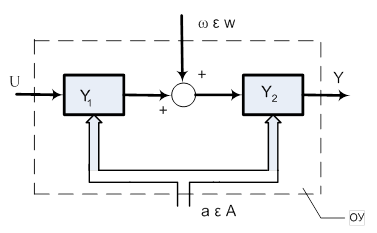
Уравнение, описывающее этот объект будет следующее:
![]()
Отсюда видно качественное различие влиянии ω и a на выход объекта. Координатное возмущение ω вносит аддитивный и независимый от входа u вклад в выход объекта, равный ![]() . Операторное же возмущение, а изменяет только вид или параметры коэффициентов операторов
. Операторное же возмущение, а изменяет только вид или параметры коэффициентов операторов ![]() и
и ![]() и не имеет независимого от u и ω влияния на выход объекта.
и не имеет независимого от u и ω влияния на выход объекта.
Таким образом, ω моделирует «линейное» воздействие внешней среды на управляемую координату y, а возмущение a - «нелинейное» ее воздействие.
В линейной теории автоматического управления полагается, а=0 и на схемах не обозначается.
Задающее воздействие y* также может быть выходом некоторой динамической системы, называемой задатчиком (Zd), который также
может быть подвержен влиянию возмущений, но ради простоты последнее не будем рассматривать.
Для введенных терминов задача управления может быть поставлена в соответствие структурная схема:
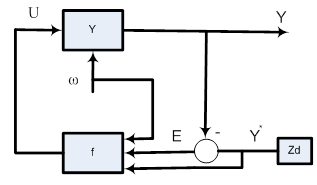
где f - оператор регулятора (или регулятор), формирующий из доступной информации, ![]() управляющее воздействие u, при котором ошибка регулирования E=0 или лежит в допустимых пределах.
управляющее воздействие u, при котором ошибка регулирования E=0 или лежит в допустимых пределах.
Охарактеризуем реальные возможности, которыми располагает теория управления для достижения поставленной выше цели.
Во-первых, специалист по синтезу систем управления, как правило, лишен возможности такого прямого влияния на внутреннее устройство объекта управления, которое могло бы привести к требуемому равенству y=y*. Поэтому по существу единственная возможность активного влияния на выход объекта связана с манипулированием управляющим воздействием u. Здесь обнаруживаются только две «чистые» стратегии поведения:
· первая связана с надлежащим формированием управляющего воздействия u на основе имеющихся данных таким образом, чтобы его, то есть u, последующее преобразование оператором объекта привело бы к требуемому результату y=y*;
· вторая стратегия связана с изменением всего оператора вход-выходного соответствия с помощью обратной связи.
В первом случае, соответствующем использованию прямой связи к управляющему воздействию u прибавляется вспомогательный сигнал uп, зависящий, например, от задания y* и преобразованный подходящим оператором fп.
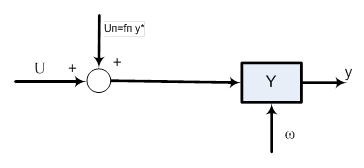
Рисунок 1
![]()
При определенных условиях ![]() достигается требуемое равенство y=y*.
достигается требуемое равенство y=y*.
Самое читаемое:
Разработка макетного лабораторного стенда для изучения работы электропривода
Цель
данного дипломного проекта - исследование принципов управления и регулирования
частотой и фазой электродвигателя. Также разработка учебного стенда для
практических исследований, так как современном учебном процессе нельзя обойтись
без наглядных пособий, особенно в сфере профессионального обучения. В этой
сфере деятельности чел ...