Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Синтезировать структуру и параметры законов регулирования
Уравнение пропорционально интегрального дифференциального регулятора имеет вид:

Типовые оптимальные процессы регулирования.
Характеристика переходного процесса, а следующее качество регулирования определяется в данных условиях выборным законом регулирования, так и настройки регулятора. При разных настройках можно получить различные переходные процессы, отличающиеся величиной перерегулирования и др. показатели качества. Оптимальными характеристикой процесса регулирования и необходимые настройки регулятора - понятия относительные. В зависимости от условий регулирования технологического процесса (и качества продукции), характеризуются возмущений и устройства аппаратуры регулирования, признаны различные процессы регулирования. В общем, случаи рекомендуется три процесса регулирования:
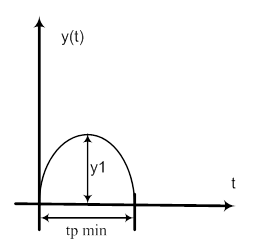
. Апериодический (граничный) процесс с min временем регулирования.
Характеризуется помимо min временем регулирования отсутствием перерегулирования и min регулирующим воздействием, т.е. min изменением подачи регулируемой среды. Последнее целесообразно в том случаи, когда регулируемое воздействие для рассматриваемой величины может оказывать влияние на другие величины.
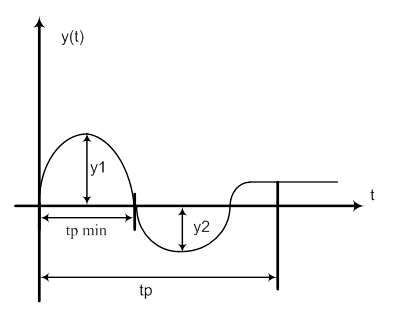
. Процесс с 20% перерегулированием и min временем первого полупериода колебания.
Процесс с 20% перерегулированием рекомендуется в тех случаях, когда допустима известная величина, которая снижает max динамическое отклонение. Min время первого периода полу-колебания, в котором имеет место наибольшее место отклонение от заданного является преимуществом, если остальная часть процесса, где отклонение значений не велики менее существенна или несущественна вовсе.
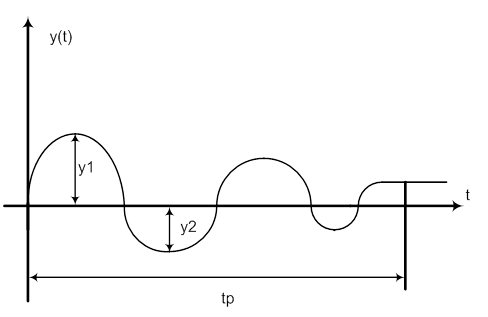
. Процесс с min квадратной площадью отклонения (min ![]() y2dt).
y2dt).
Характеризуется наибольшим перерегулированием (40-45%) и временем регулирования, наибольшим регулирующим воздействием. Ему свойственно наименьшая величина max динамического отклонения (φ1)
В качестве типового оптимального процесса регулирования рассмотрим процесс с 20% перерегулированием, а в качестве регулятора - пропорционально интегральный регулятор, тогда согласно методики Копеловеча А.П. из книги «Автоматическое регулирование»
Самое читаемое:
Определение основных параметров усилительных каскадов на транзисторах
, кОм, кОм, кОм, кОм, кОм, мА, кОм, кОм
1
33
13
10
3,3
0,62
1
50
0.7
2
...