Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Модель Уолфиша-Икегами
Модель Уолфиша-Икегами признана самой лучшей для предсказания уровня сигнала в малых сотах. Эта модель основана на физическом представлении поля в точке приема в виде двух составляющих: когерентной и рассеянной. Когерентная составляющая определяется волной, дифрагирующей вокруг строений вдоль дороги со стороны БС. Рассеянный компонент создают волны, которые образуются в результате переизлучения строениями падающей на них волны от БС. Рассеянный компонент приходит с направлений, не совпадающих с направлением на БС и даже противоположных этому направлению. Модель утверждает (рисунок 1.17), что в условиях города с относительно невысотной, но плотной застройкой основным путем распространения радиосигнала (в случае отсутствия прямой видимости между узлами) является путь, проходящий через крыши зданий (которые могут быть описаны как серии последовательных экранов), сопровождаемый многократным рассеиванием [25].
Основные параметры, используемые в модели:
частота передачи (f);
высота передающей антенны (hb);
высота приемной антенны (hm);
расстояние между приемником и передатчиком (d);
средняя высота зданий (hr);
средняя ширина улиц (w);
расстояние между зданиями (b).
Энергия принимаемого сигнала зависит от того, где находится передатчик по отношению к приемнику.
Расчетные формулы для модели Уолфиша-Икегами получены при параметрах: расстояние между БС и АС от 0,02 км до 5 км в диапазоне частот 800 .2000 МГц, высота антенн БС ht = 4 .50 м, высота антенн АС hr= 1 .3 м; высота близлежащих к БС зданий до 60 м. Имеем:
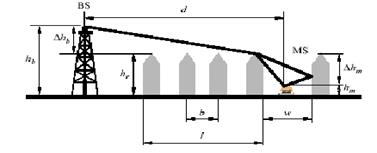
Рисунок 1.17 - Основной путь распространения радиосигнала и параметры модели Уолфиша-Икегами
. В зоне прямой видимости («line of sight», LOS). Для вычисления величины потерь при распространении используется относительно простая формула
![]() .
.
. Вне зоны прямой видимости («none line of sight», NLOS).
Этот случай более сложен. Значение, на которое уменьшается мощность принимаемого сигнала при прохождении пути от источника к получателю, задается следующей формулой:

где ![]() - потери при распространении в свободном пространстве, без препятствий:
- потери при распространении в свободном пространстве, без препятствий:

![]() - потери на стороне получателя, вызванные рассеиванием радиосигнала при отражении от поверхности «конечной» улицы, на которой находится приемник:
- потери на стороне получателя, вызванные рассеиванием радиосигнала при отражении от поверхности «конечной» улицы, на которой находится приемник:

![]() - cоставляющая потерь, зависящая от ориентации улиц относительно направления прихода сигнала:
- cоставляющая потерь, зависящая от ориентации улиц относительно направления прихода сигнала:
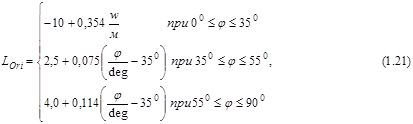
где φ - ориентация дороги по отношению к пути распространения сигнала.
Как видим, диапазон изменения значений потерь от ориентации улиц составляет 14 дБ.
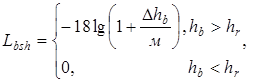
![]() - оценка величины потерь, вызываемых многократным переотражением и рассеиванием радиосигнала от крыш домов (впервые опубликована Уолфишем и Бартони);
- оценка величины потерь, вызываемых многократным переотражением и рассеиванием радиосигнала от крыш домов (впервые опубликована Уолфишем и Бартони);
![]()
где d - cреднее расстояние между приемником и передатчиком.
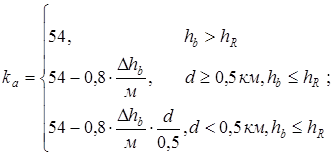
Параметры kd и kf определяют зависимость величины потерь при распространении от частоты сигнала и рассеивания при прохождении через последовательные экраны. Увеличение потерь при уменьшении высоты антенны по отношению к средней высоте окружающих зданий задается параметром ka.
В рабочих формулах (1.18) - (1.22) и в формулах их коэффициентов следует подставлять частоту в мегагерцах, протяженность трассы в километрах, остальные параметры модели (hRoof, w, hRX, hTX) в метрах. Эти формулы позволяют определить медианные потери как для трасс, на которых антенна БС расположена над городской застройкой, так и для трасс, которых антенна БС расположена на уровне крыш или ниже этого уровня.
При проектировании малых сот необходимы сведения о конкретных участках городских трасс. В ряде случаев можно воспользоваться статистическими данными для города. Районы современной городской застройки: плотность застройки 90 зданий на 1 км ; средняя длина здания 80 . 105 м; ширина 15 м; этажность от 9 до 14; просветы между зданиями 15 .20 м; средняя дальность прямой видимости в слое городской застройки 170 м. Застройку можно считать однородной для районов, где нет больших площадей и парков.
Самое читаемое:
Разработка передающего устройства системы беспроводного удаленного доступа
Передача информации в пространстве с помощью радиоволн осуществлялась со
времени изобретения радио в конце девятнадцатого века. В настоящее время
интерес к радиосвязи возрос в связи с тенденцией отказа от проводов. Появился
модный термин «беспроводная связь» (wireless), что является синонимом
«радиосвязи».
Передают обычно речь, м ...