Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Коэффициент относительной асимптотической эффективности
Данные значения КАОЭ получаются путем сравнения работы алгоритмов при настройке на "свою" помеху с работой в последетекторных условиях.
Как уже отмечалось ранее, обнаружение по огибающей проигрывает додетекторному случаю, поскольку рассматриваемые в работе алгоритмы не являются АО. Этот проигрыш весьма велик, более 6 дБ, однако все-таки алгоритмы работоспособны.
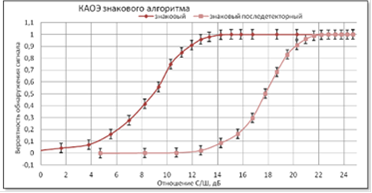
Рисунок 29 - Характеристика обнаружения знакового и последетекторного знакового алгоритмов на фоне лапласовской помехи
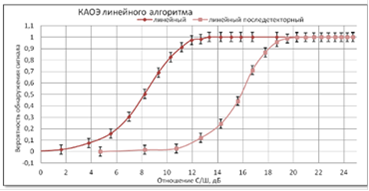
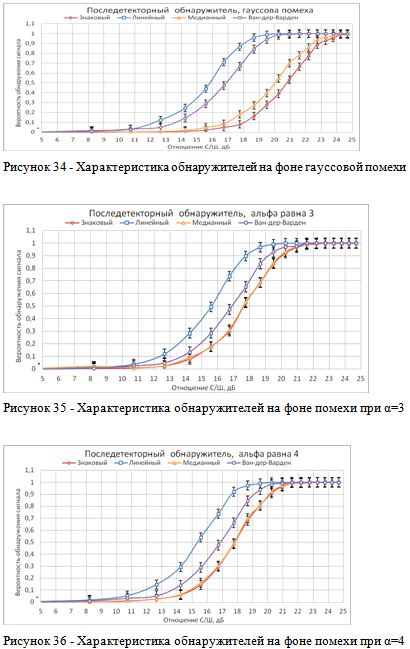
Рисунок 30 - Характеристика обнаружения линейного и последетекторного линейного алгоритмов на фоне гауссовской помехи
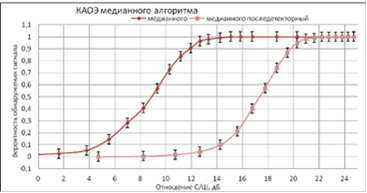
Рисунок 31 - Характеристика обнаружения медианного и последетекторного медианного алгоритмов на фоне лапласовской помехи
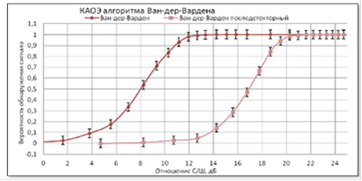
Рисунок 32 - Характеристика обнаружения алгоритмов последетекторного и Ван-дер-Вардена на фоне гауссовской помехи
Примечателен также тот факт, что сохраняется тенденция лучшей работы обнаружителя при настройке на "свою помеху", например знаковый алгоритм выигрывает при лапласовской помехе у себя же на фоне гауссова шума.
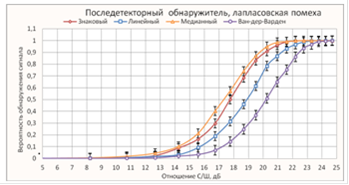
Рисунок 33 - Характеристика обнаружителей на фоне лапласовской помехи
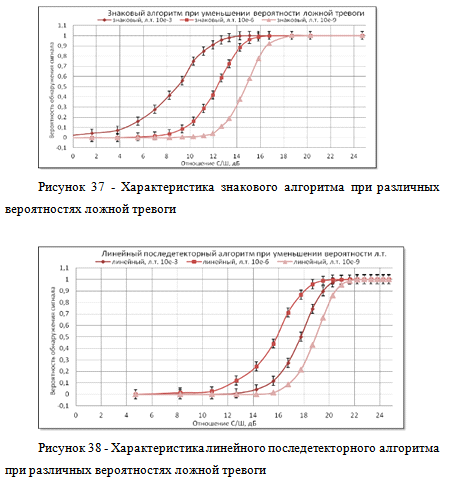
Также рассмотрены различные вероятности ложной тревоги, влияющие непосредственно на порог принятия решения в каждом из алгоритмов. С уменьшением вероятности ложной тревоги возрастает порог, что приводит к смещению характеристик в направлении большего отношения С/Ш:
Самое читаемое:
Разработка микроконтроллерного устройства стабилизации температуры
Эффективная организация контроля информации приобретает всё большее
практическое значение, прежде всего как условие успешной практической
деятельности людей. Объем информации, необходимой для нормального
функционирования современного общества, растёт из года в год. На сегодняшний
день складывается ситуация, в которой наряду с самой ...