Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Выбор микроконтроллера
В составе устройства будем использовать микроконтроллер ATmega8535, обладающий необходимым количеством портов вводы/вывода и прерываний.
Некоторые отличительные особенности:
· высокая производительность при малом потреблении;
· развитая RISC архитектура;
· энергонезависимая память программ и память данных;
· 40 - выводной корпус PDIP;
· 32 программируемых входа-выхода
· рабочее напряжение питания: 4.5 В до 5.5 В;
· рабочая тактовая частота: 0-16 МГЦ.
Таблица 1 - Параметры микроконтроллера ATMEGA8535.
|
Flash (байт) |
ISP |
SRAM (байт) |
EEPROM (байт) |
IOR |
P |
I/O |
ALT |
SPI |
USART |
TWSI |
T/C0 |
T/C1 |
T/C2 |
ADC |
AC |
PHM |
|
8K |
+ |
512 |
512 |
54 |
4 |
32 |
26 |
+ |
+ |
A |
E |
C |
8 |
+ |
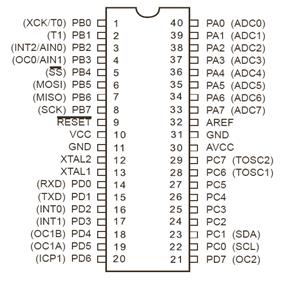
Рис.4.1 - Вид сверху и цоколевка микроконтроллера ATMEGA8535
Самое читаемое:
Разработка мер совершенствования системы инженерно-технической защиты информации в конференц-зале коллекторского агентства
В современных условиях информация играет решающую роль, как в
процессе экономического развития, так и в ходе конкурентной борьбы на
внутреннем и внешнем рынках.
Успешное функционирование и развитие предприятий все больше
зависит от совершенствования их деятельности в области обеспечения
информационной безопасности в сфере произво ...