Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Моделирование АСР с использованием программы 20-sim.
Сначала построим схему:
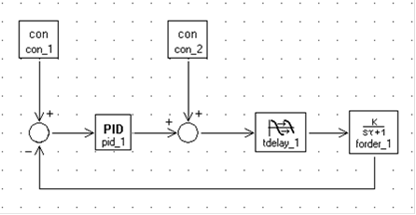
Рис. 5.
Далее зададим параметры для каждого блока:
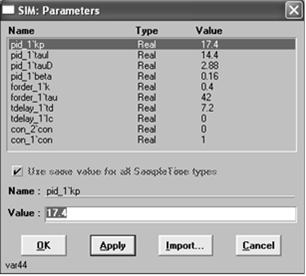
Рис. 6.
Поставим нулевые значения:
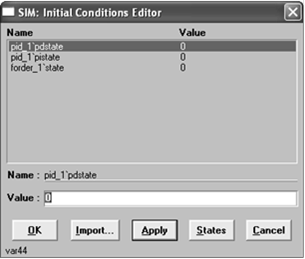
Рис. 7.
Определим диапазон по оси абсцисс:

Рис. 8.
Выберем блоки, чтобы задать вход и выход сигнала:

Рис. 9.
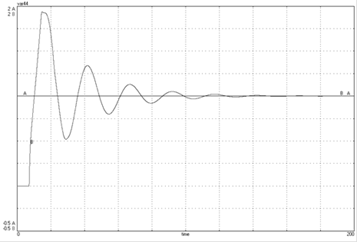
Получился следующий график:
Самое читаемое:
Измерительный преобразователь переменного напряжения в постоянное
Измерительные
преобразователи для систем управления предназначены для информационной связи
первичных источников информации (датчиков) и исполнительных устройств системы
управления.
Такие
преобразователи выполняются, как правило, с использованием интегральных схем.
Применение интегральных схем позволяет сократить сроки проектиров ...
www.techstages.ru : Все права защищены! 2026