Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Моделирование в среде EWB
Проведем моделирование ОУ с датчиком в среде EWB. Так как нижний предел току в программе - 1 мкА, поэтому будем использовать его как заменитель нА. Для наглядности примем RG = 10 кОм, RL = 1 кОм, что соответствует усилению в 10 раз. Создадим разность потенциалов между вспомогательным и индикаторном электроде, подключив малый источник тока. То же самое сделаем между электродами сравнения и индикаторным, но в этом случае источник тока будит моделировать малый входной ток для датчика. Результаты моделирования представлены ниже на рисунках 7.4 и 7.5. На http://prodostavku.com купить керамзит в калининграде.
Моделирование показало, что ОУ с заданными параметрами успешно проходит тестирование: коэффициент усиления пропорционален делителю напряжения RG и RL, а значит и концентрации газа на выходе датчика пропорционально его количеству.
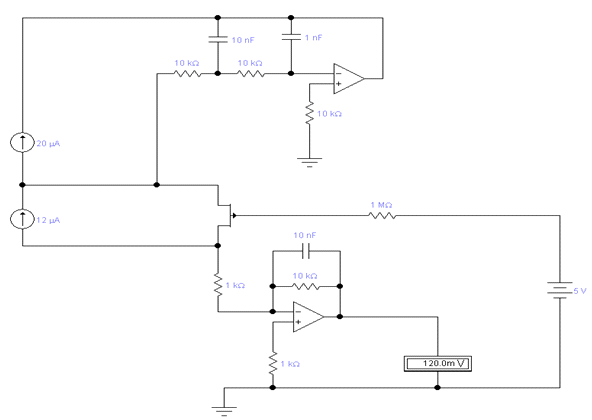
Рисунок 7.4 - Результат моделирования датчика №1
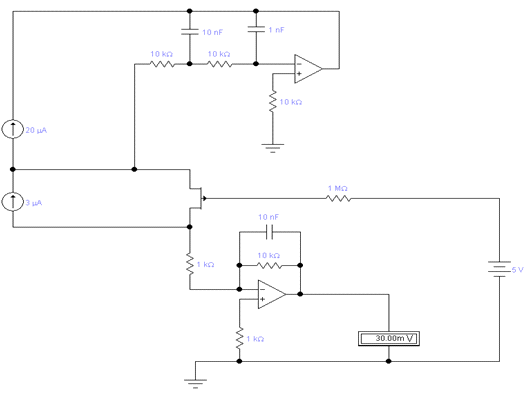
Рисунок 7.5 - Результат моделирования датчика №2
Самое читаемое:
Маршрутизация в мультисервисных сетях
Маршрутизация на сегодняшний день определяется не формальными
правилами и описаниями, характерными для сетей предыдущих поколений, а
требованиями клиента и экономическими соображениями оператора связи. Чтобы
оптимизировать работу сетей, разрабатываются различные методы маршрутизации,
обеспечивающие сбалансированную наг ...