Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Исследования алгоритма на сигналах смоделированных на компьютере
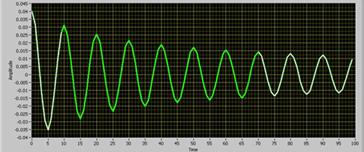
Рис. 27 - N=100, n1=10, n2=70, P=5, σ=3.38377E-5
Добавим к сигналу (4.4) белый гауссов шум с СКО=0,01.
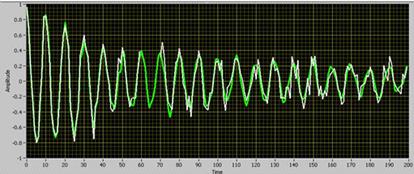
Рис. 28 - N=200, n1=60, n2=70, P=50 σ= 0,138959
Относительная ошибка аппроксимации удаленного участка σ=0,138959
Добавим к сигналу (4.4) белый гауссов шум с СКО=0,02.
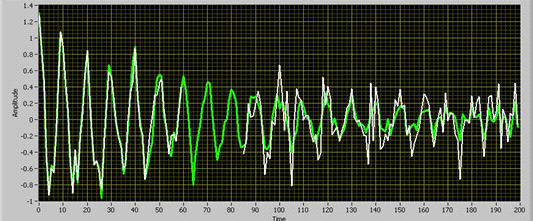
Рис. 29 - N=200, n1=60, n2=85, P=50 σ=0,19893
Относительная ошибка аппроксимации удаленного участка σ=0,19893.
Качественно можно видеть, что алгоритм восстановил участки сигнала
Рассмотрим квазипериодический сигнал с изменяющейся частотой, в качестве такого сигнала возьмем линейный частотно - модулированный (ЛЧМ) сигнал, представленный выражением
![]() . (4.5)
. (4.5)
Осциллограмма сигнала представлена на рисунке 30.
Частота сигнала за 500 отсчетов изменяется по линейному закону от 0,01 до 0,015.
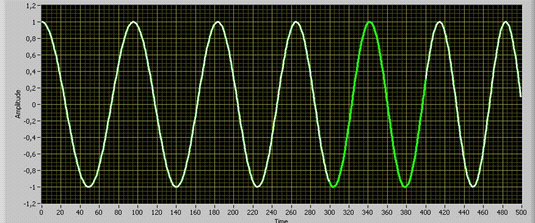
Рис. 30 - N=500, n1=300, n2=400, P=35, σ=1,67315E-6
Добавим к сигналу (4.5) белый гауссов шум с СКО=0,1
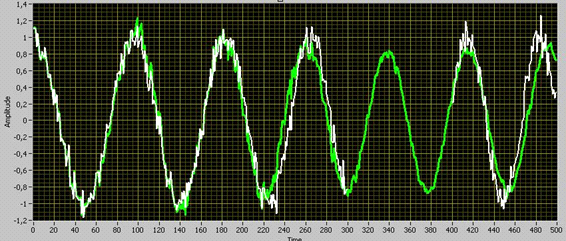
Рис. 31 - N=500, n1=300, n2=400, P=250 σ= 0,0706444
Для восстановления сигнала требуется больше отсчетов на известных участках и увеличить количество комплексных экспонент для аппроксимации. При добавлении шума количество комплексных экспонент необходимо еще увеличить.
Относительная ошибка аппроксимации удаленного участка σ=0,07.
Рассмотрим квазигармонический сигнал с частотой, меняющейся по синусоидальному закону.
![]() (4.6)
(4.6)
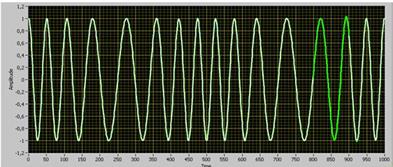
Рис. 32 - N=1000, n1=800, n2=900, P=477, ошибка 2,41305E-5
За 1000 отсчетов частота сигнала меняется по синусоидальному закону от 0,01 до 0,02 два раза. Белым цветом показан исходный сигнал, зеленым - аппроксимированный.
Так как ЧМ сигнал не входит в модель алгоритма Прони, то для его аппроксимации и, соответственно, восстановления удаленного участка требуется большее количество комплексных экспанент.
Самое читаемое:
Метод частотной модуляции радиотехнического сигнала
За последнее время существенно повысился технический уровень
электронной техники. Быстрое развитие требует создания все более точного и
сложного автоматизированного технологического оборудования для изобретения
более сложных и совершенных устройств с лучшими характеристиками и параметрами,
меньшими габаритами.
Для у ...