Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
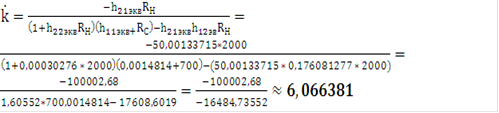
Определение сквозного коэффициента усиления по напряжению
) Режим холостого хода на входе (
![]()
![]() )
)
![]()
![]() .
.
В таком случае уравнения ![]()
![]() -формы будут выглядеть следующим образом:
-формы будут выглядеть следующим образом:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

![]()
![]()

![]()

![]()
![]() ;
;
![]()
![]() .
.
Зная дифференциальные параметры нашего устройства, представим его в виде линейного четырехполюсника, описываемого ![]()
![]() - формой записи уравнений рабочего состояния. К входным клеммам подключим источник сигнала, который характеризуется ЭДС и внутренним сопротивлением (
- формой записи уравнений рабочего состояния. К входным клеммам подключим источник сигнала, который характеризуется ЭДС и внутренним сопротивлением (![]()
![]() ), а к выходным клеммам сопротивление нагрузки (
), а к выходным клеммам сопротивление нагрузки (![]()
![]() ), на котором будет выделяться переменное напряжение (
), на котором будет выделяться переменное напряжение (![]()
![]() ).
).
Сквозным коэффициентом усиления называют
![]()
![]()
![]()
![]() (1);
(1);
![]()
![]() (2);
(2);
![]()
![]()
![]()
![]()
![]()
![]()
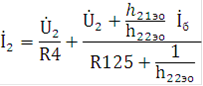
Подставим (2) в (1):
![]()
![]() ;
;
![]()
![]() ;
;

 ;
;
Самое читаемое:
Моделирование процесса контроля и настройки телевизоров
телевизор схема
В предлагаемом курсовом проекте рассматривается задача моделирование
процесса контроля и настройки телевизоров. Цель курсовой работы - составление и
описание модели, моделирование процесса обработки некоторого количества
заданий, получение основных характеристик модели исследуемой системы, анализ и
интерпретация резул ...