Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Датчик расстояния
.2.4 Примеры обработки результатов поверки датчика расстояния
. Среднеарифметическое значение расстояния
![]() , (5)
, (5)
![]() =
= ![]() .см.
.см.
. Дисперсия значений расстояния
![]() =
= ![]() , (6)
, (6)
 .см.
.см.
.Среднеквадратичное отклонение расстояния
![]() , (7)
, (7)
![]() =
= ![]() см.
см.
.3 Определение границы области достоверных показаний датчика расстояния
.3.1 Методика поверки
. Установить поверхность согласно схеме поверки (рис. 11)
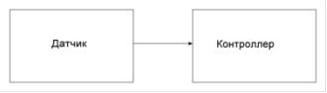
Рис. 11 Структурная схема соединения приборов
. Включить контроллер и обеспечить вывод показаний на дисплей.
. Установить датчик и поверхность на стенд как показано на рис.12.
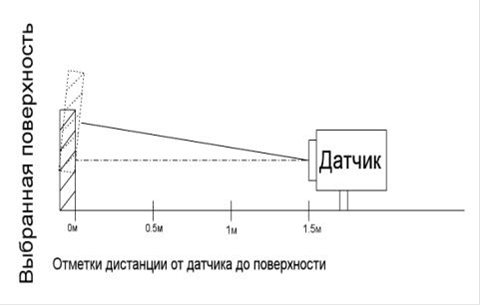
Рис.12 Схема поверки датчика дистанции
. Установить датчик на отметку 1.5м от установленной поверхности и перпендикулярно ей.
. Меня позицию и угол наклона поверхности относительно датчика найти угол при которых датчик перестает показывать достоверные показания.
. Снять 3 по очередных показания с контроллера и занести их в таблицу 3.
. Построить график зависимости показаний контроллера.
. Повторить пункты 5-8 для точек: 1, 0.5, согласно таблице 3.
Таблица3
Результаты определения границы области достоверхных показаний
|
дерево | ||||||
|
Расстояние см |
Угол отклонения в лево |
Угол отклонения в право | ||||
|
150 |
8 |
8 |
9 |
7 |
7 |
8 |
|
100 |
17 |
16 |
16 |
15 |
16 |
16 |
|
60 |
31 |
30 |
30 |
28 |
28 |
29 |
|
20 |
25 |
25 |
25 |
23 |
23 |
22 |
|
метал | ||||||
|
Расстояние см |
Угол отклонения в лево |
Угол отклонения в право | ||||
|
150 |
11 |
8 |
9 |
9 |
7 |
8 |
|
100 |
23 |
22 |
21 |
19 |
16 |
17 |
|
60 |
33 |
32 |
30 |
30 |
28 |
29 |
|
20 |
24 |
25 |
25 |
21 |
23 |
22 |
|
резина | ||||||
|
Расстояние см |
Угол отклонения в лево |
Угол отклонения в право | ||||
|
150 |
9 |
8 |
9 |
10 |
7 |
8 |
|
100 |
22 |
20 |
21 |
19 |
18 |
16 |
|
60 |
31 |
30 |
30 |
29 |
28 |
29 |
|
20 |
23 |
25 |
25 |
22 |
23 |
22 |
Самое читаемое:
Информационно-вычислительная сеть на основе архитектуры клиент-сервер, предметная область Магазин бытовой техники
Компьютерная сеть обозначает
наборы связанных между собой автономных компьютеров. Два компьютера называются
связанными между собой, если они могут обмениваться информацией. Связь не
обязательно должна осуществляться при помощи медного провода. Могут
использоваться самые разнообразные средства связи, включая волоконную оптику,
...