Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Построение переходных характеристик объекта регулирования по основной (угол поворота вала редуктора) и вспомогательным регулируемым величинам (скорость вращения вала и ток якоря электродвигателя)
Для построения переходных характеристик объекта регулирования по основной (угол поворота вала редуктора) и вспомогательным регулируемым величинам (скорость вращения вала и ток якоря электродвигателя) в Simulink MatLab запускаем пакет MatLab. Нажав кнопку ![]() (Simulink) на панели инструментов командного окна MATLAB мы запускаем программу Simulink. Для создания модели в среде SIMULINK необходимо последовательно выполнить ряд действий. Создать новый файл модели с помощью команды File/New/Model. Далее располагаем блоки в окне модели. Для этого из соответствующего раздела библиотеки выбираем необходимые блоки и перетаскиваем их в окно модели Simulink. Так, мы выбираем блок Transfer Fcn из раздела Continuous, Sum из Math Operations, Scope из Sinks, Pulse Generator и Sine Wave из Sources. Соединяем элементы схемы. Окно модели показано на рисунке 3.1.1.
(Simulink) на панели инструментов командного окна MATLAB мы запускаем программу Simulink. Для создания модели в среде SIMULINK необходимо последовательно выполнить ряд действий. Создать новый файл модели с помощью команды File/New/Model. Далее располагаем блоки в окне модели. Для этого из соответствующего раздела библиотеки выбираем необходимые блоки и перетаскиваем их в окно модели Simulink. Так, мы выбираем блок Transfer Fcn из раздела Continuous, Sum из Math Operations, Scope из Sinks, Pulse Generator и Sine Wave из Sources. Соединяем элементы схемы. Окно модели показано на рисунке 3.1.1.
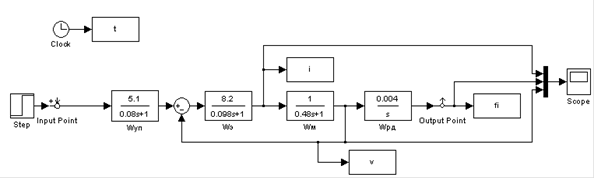
Рис. 3.1.1 Окно модели в Simulink MatLab
Переходная функция - это функция, которая описывает поведение выходной величины, когда на вход подано единичное ступенчатое воздействие при нулевых начальных условиях. График переходной функции и есть переходная характеристика.
Переходные характеристики объекта регулирования по основной и вспомогательным регулируемым величинам:
Построение в пакете MatLab:
>> subplot(3,1,1)
>> plot(t,i), grid on
>> subplot(3,1,2)
>> plot(t,v), grid on
>> subplot(3,1,3)
>> plot(t,fi), grid on
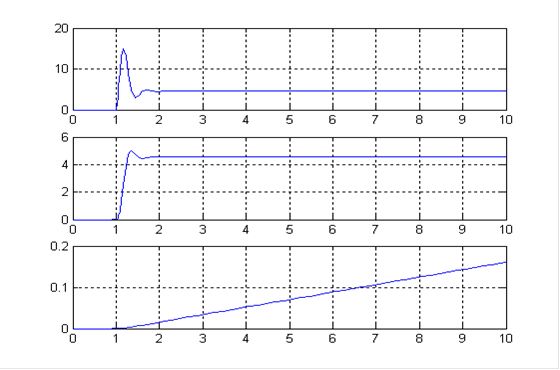
Рис. 3.1.2 Переходные характеристики объекта регулирования:
а- скорость вращения вала ,
б- ток якоря электродвигателя ,
в- угол поворота вала редуктора.
3.2 Построение амплитудной и амплитудно-фазовой частотных характеристик объекта регулирования по основной регулируемой величине
Частотные характеристики объекта регулирования можно получить, используя инструмент Simulink LTI-Viewer, либо используя команды пакета расширения Control System Toolbox. Воспользуемся вторым вариантом. Для этого нужно описать передаточную функцию объекта управления с помощью команды, создающей LTI-систему с одним входом и одним выходом в виде:
TF([bm,…,b1,b0],[an,…,a1,a0]),
где bm,…,b1,b0 и an,…,a1,a0 - значения коэффициентов полиномов В и А передаточной функции.
Далее приведено написание передаточных функций звеньев объекта в программе MatLab.
>> wup=tf([5.1], [0.08 1])function:
5.1
---------
.08 s + 1
>> we=tf([8.2],[0.098 1])function:
8.2
----------
.098 s + 1
>> wm=tf([1], [0.48 1])function:
1
---------
.48 s + 1
>> wred=tf([0.004], [1 0])
Transfer function:
.004
----
S
Пользуясь правилами структурного преобразования, заменим звенья объекта одним эквивалентным звеном с помощью команд:(wl ,w2) - последовательное соединение динамических звеньев;(wl,w2) - параллельное соединение динамических звеньев;(wl, w2) - включение звена w2 в контур отрицательной обратной связи к звену wl;(wl,w2,sign) - включение звена w2 в контур обратной связи звена wl с указанием знака+или -,т.е. feedback(wl,w2, l)- для положительной обратной связи.
Преобразования в MatLab:
>> w1=series(we,wm)function:
8.2
------------------------
.04704 s^2 + 0.578 s + 1
>> w0=tf([1],[1])function:
>> w2=feedback(w1,w0)function:
8.2
--------------------------
.04704 s^2 + 0.578 s + 9.2
>> w3=series(wup,w2)function:
Самое читаемое:
Анализ прохождения детерминированного сигнала через линейную цепь с постоянными параметрами
Нахождение
корреляционной функции для входного сигнала, сдвинутого на на
интервале
При
обработке сигналов часто приходится сравнивать сигнал со смещёнными во времени
копиями этого сигнала, а также другими сигналами. О степени связи сигнала со
смещёнными копиями можно судить по корреляционным функциям. Для вещественного
сигнал ...