Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Схемная реализация основного канала управления
Следующий важный узел, это интегратор ошибки (рисунок 2.26), в реальном блоки его роль выполняет прибор И100. Динамические характеристики интегратора должны бить приближены к характеристикам реального прибора.
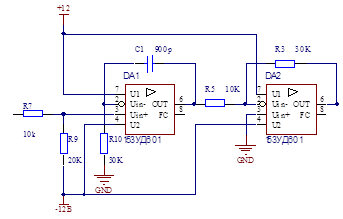
Рис. 2.26. Интегратор ошибки с инвертирующим усилителем.
Кроме интегрирования ошибки, данный блок должен выполнять функцию сумматора, сравнивая выходное напряжение с опорным. Роль сумматора выполняет резисторная звезда R7 и R9, (необходимо добавить стабилитрон, либо использовать стабильный источник напряжения, иначе от питания будет плавать). В качестве опорного напряжения принять -12В, напряжение на шине должно быть 6В, следовательно напряжение ошибки (выходное напряжение сумматора) определяется по следующему выражению:
![]() , (2.14)
, (2.14)
где Uвх - напряжение на шине, а Uсм - опорное напряжение -12В.
Расчет параметров блока интегратора:
Как и в предыдущем случае, входной резистор R7 выберем 10КОм, тогда согласно выражению 2.14, сопротивление резистора смещения равно 20КОм. Важно отметить, что коэффициент передачи резисторного сумматора меньше единицы и зависит от номиналов резисторов входящих в него. Следовательно выражение 2.14 записано не корректно. В нашем случае этот факт не имеет значения так как сумматор подключен ко входу интегратора, а выход интегратора подключен к инвертору, коэффициент передачи которого будет подобран при окончательной настройке схемы.
Конденсатор C1 и резистор R10 определяют постоянную времени интегратора. Постоянная времени интегратора подбиралась в процессе моделирования исходя из устойчивости переходного процесса, при сочетании параметров R и C приведенных на схеме (рисунок 2.26), она равна:
![]() (2.15)
(2.15)
Инвертирующий усилитель в составе блока интегратора нужен для подбора статического коэффициента передачи, и введении в контур обратной связи дополнительной инверсии (чтобы ОС стала отрицательной).
На начальном этапе проектирования коэффициент передачи инвертора был задан -1 (R5=10КОм, R3=10КОм), но в процессе моделирования (об этом будет подробно описано в главе моделирование) оказалось, что качество переходных процессов не приемлемое, и причина тому низкий коэффициент в контуре обратной связи. Поэтому коэффициент передачи инвертора был увеличен до -3 (R5=10КОм, R3=30КОм). Это позволило добиться требуемой статической ошибки и качества ПП.
Быстрая обратная связь состоит из дифференцирующей R11 С4 цепочки и буферного не инвертирующего усилителя (исключает взаимовлияние каналов ШС друг на друга через резисторную звезду) (рисунок 2.27). Используя методы ТАУ для анализа структурной схемы системы, можно подобрать ориентировочные значения параметров элементов входящих в неё, но из - за того, что модель не полно описывает свойства реальной системы, эти параметры при дальнейшей работе придётся уточнять. Моделируя систему в целом в Altium Disigner, исходя из качества ПП, постоянная времени дифференциатора была подобрана:
![]() (2.16)
(2.16)
Коэффициент передачи также подбирался при моделировании путём изменения номинала резистора R4. Резистор R12 был задан как и в предыдущих случаях 10КОм.
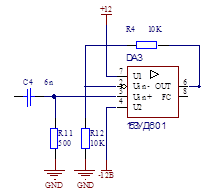
Рис. 2.27. Дифференциатор усилитель быстрой ОС.
Напряжения пропорциональные токам ключей ШС поступают на вход резисторного сумматора (резисторная звезда) (рисунок 2.28). Сумма напряжений поступает на два компаратора выполненных на операционных усилителях, порог срабатывания первого выше 0.5В, порог срабатывания второго ниже 0.15В. Величина порогов влияет на устойчивость работы схемы, и зависит от числа каналов ШС, следовательно при макетировании её придётся уточнять.
Самое читаемое:
Конструкторское проектирование усилителя мощности звуковой частоты
Разрабатываемое изделие - стереоусилтель УМ55-101С, далее просто
стереоусилитель, предназначено для усиления сигнала звуковой частоты. Может
агрегатироваться сразличными видами акустических систем, с максимальной
выходной мощностью не менее 60 Вт на канал.
Изделие может эксплуатироваться в условиях категории исполнения УХЛ 4.2.
...