Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Построение модели объекта
Рассматривается система управления, объектом в которой является двигатель постоянного тока (ДПТ). При использовании ДПТ в автоматических системах наиболее удобна схема включения двигателя с независимым возбуждением. Особенность такого включения заключается в том, что напряжения на обмотках статора (неподвижной обмотке возбуждения) и ротора (обмотке на вращающемся якоре) можно изменять независимо, тем самым гибко управляя скоростью вращения в широком диапазоне.
Двигатель является электромеханическим устройством, поэтому его поведение можно описать соответствующими электрическими и электромеханическими законами. Электрическая схема замещения ДПТ приведена на рисунке 1. Обмотка возбуждения двигателя создает магнитное поле, которое пропорционально протекающему в ней току . В обмотке якоря также протекает ток и в результате взаимодействия магнитного поля обмотки возбуждения и тока обмотки якоря на валу двигателя создается механический момент вращения . Если этот момент превышает суммарный момент сопротивления , то двигатель начинает вращаться.
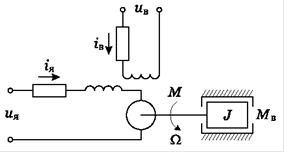
Рисунок 1 - Схема включения двигателя
На основании второго закона Кирхгофа, записанного для обмотки возбуждения (ОВ), справедливо уравнение электрического баланса
![]() (1)
(1)
где - напряжение, подаваемое на ОВ, В; - ток в ОВ, А; - сопротивление ОВ, Ом; - индуктивность ОВ, Гн.
Уравнение электрического баланса для обмотки якоря (ОЯ) записывается аналогично в виде
![]() (2)
(2)
где - напряжение, подаваемое на зажимы якорной цепи, В; - ток в цепи якоря, А; - сопротивление ОЯ, Ом; - индуктивность ОЯ, Гн; - ЭДС вращения двигателя, В.
В соответствии с уравнением (2), напряжение равно сумме падений напряжения на активной и реактивной частях обмотки и электродвижущей силы.
Уравнение механического баланса получается из второго закона Ньютона и имеет вид
![]() (3)
(3)
где - момент инерции вращающихся частей, кг.м2; ![]() - скорость вращения вала, рад/с; - вращающий момент, Н.м; - суммарный механический момент действующих на вал двигателя внешних сил, Н.м.
- скорость вращения вала, рад/с; - вращающий момент, Н.м; - суммарный механический момент действующих на вал двигателя внешних сил, Н.м.
Уравнения (1) - (3) могут быть переписаны для изображений сигналов:
![]() (4)
(4)
![]() (5)
(5)
![]() (6)
(6)
Постоянные времени, входящие в уравнения (5) и (4), определяются отношениями
(7)
(8)
![]()
Величина вращающего момента определяется по формуле
![]() (9)
(9)
а ЭДС двигателя связана с угловой скоростью соотношением
![]() (10)
(10)
Коэффициенты и зависят от конструктивных параметров двигателя и тока в обмотке возбуждения.
Управление двигателем можно осуществлять со стороны обмотки якоря (якорное управление) и со стороны обмотки возбуждения (полюсное управление). В курсовом проекте рассматривается якорное управление, поэтому следует считать, что , а магнитный поток не изменяется. Поэтому коэффициенты и будем считать постоянными. Их значения можно определить по паспортным данным двигателя. Для этого необходимо рассмотреть номинальный статический режим работы ДПТ, когда все токи в обмотках, а также скорость вращения имеют установившиеся значения. В этом случае в уравнениях (2) и (1) следует принять тогда
![]() (11)
(11)
![]() (12)
(12)
Значение ЭДС может быть найдено по формуле (10) при номинальной скорости вращения ![]() . Подставляя его в уравнение (11), получаем, что
. Подставляя его в уравнение (11), получаем, что
![]() (13)
(13)
Из уравнения (13) следует формула вычисления постоянного коэффициента
![]() (14)
(14)
в которой номинальный ток якоря рассчитывается по формуле (5)
![]() (15)
(15)
где - номинальная мощность, Вт; КПД - коэффициент полезного действия.
Самое читаемое:
Модернизация канала формирования импульсов запуска блока Т-17М
Постоянное совершенствование средств воздушного нападения,
опыт войн и вооруженных конфликтов последних десятилетий предъявляют повышенные
требования к возможностям зенитных комплексов ближнего действия по обнаружению,
сопровождению и поражению воздушных целей в различных условиях обстановки.
Однако подавляющее большинство зенитны ...