Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Построение модели объекта
В паспортных данных ![]() дано в об/мин, для расчетов
дано в об/мин, для расчетов ![]() надо перевести в рад/с
надо перевести в рад/с
![]() (16)
(16)
где n - номинальная частота вращения в об/мин.
![]()
![]()
![]()
Коэффициент , как следует из выражения (9), также вычисляется по номинальным значениям момента и тока по формуле
(17)
в которой номинальный момент можно определить из выражения
![]() (18)
(18)
![]()
![]()
Таким образом, имея численные значения всех постоянных величин, характеризующих работу двигателя, можно перейти к построению его динамической детерминированной модели в виде передаточной функции.
Наблюдаемыми координатами двигателя, характеризующими его состояние, являются угол поворота, скорость и ускорение вала. В рассматриваемом случае наиболее удобной для использования в модели двигателя координатой является угловая скорость ![]() . Эту координату будем считать выходной.
. Эту координату будем считать выходной.
Управляющим воздействием (входной координатой) является напряжение . Из уравнения (6) получается выражение, описывающее механическую часть:
![]() (19)
(19)
Электромагнитные процессы в якоре описываются уравнением (5), из которого следует, что
![]() (20)
(20)
С учетом формул (9) и (10), получается, что
![]() (21)
(21)
![]() (22)
(22)
Формулы (21) и (22) описывают работу двигателя при якорном управлении, и им соответствует структурная схема, показанная на рисунке 2. Момент внешних сил рассматривается как возмущающее воздействие на систему.
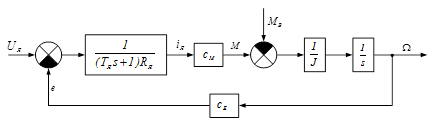
Рисунок 2 - Структурная схема модели двигателя при якорном управлении
Передаточная функция системы определяется как отношение преобразований Лапласа выходной и входной координат
![]() (23)
(23)
Делая подстановку формулы (21) в (22), отношение (23) можно выразить в виде
![]() (24)
(24)
Эта передаточная функция может быть записана в форме звена второго порядка
![]() (25)
(25)
где - коэффициенты, которые следует выразить и рассчитать через параметры двигателя, входящие в формулу (24).
Момент инерции выбирается из диапазона
![]() (26)
(26)
![]()
Примем J=0,0476 кг.м2.
![]() (27)
(27)
![]()
![]() (28)
(28)
![]()
![]() (29)
(29)
![]()
Для вычисления всех необходимых значений коэффициентов используется программа, текст которой имеет вид:
P = 180;= 110;= 1000*2*pi / 60= 0.545;= 5.41;= 810;= 0.122;= 220;
Ta = La / Ra= Uc / Rc;= (P / (Ua*K)) - ((Ic*Uc) / Ua);= (Ua - Ra*Ia) / Fr= P / Fr;= Mn / Ia= 10 * (La*(P^2)) / ((Ra*Fr*Ia)^2)= 20 * (La*(P^2)) / ((Ra*Fr*Ia)^2)= (Jmax + Jmin) / 2= Cm / (J*Ra*Ta)= 1 / Ta= (Cm*Ce) / (J*Ra*Ta)
Моделирование объекта управления в среде Simulink
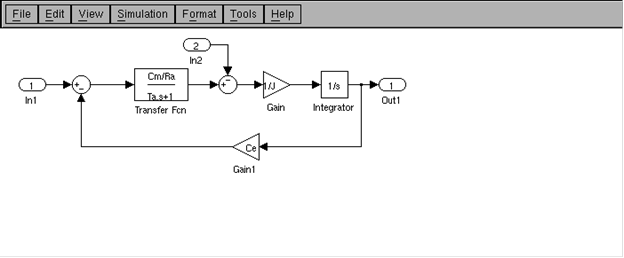
Рисунок 3 - Модель двигателя (без нагрузок)
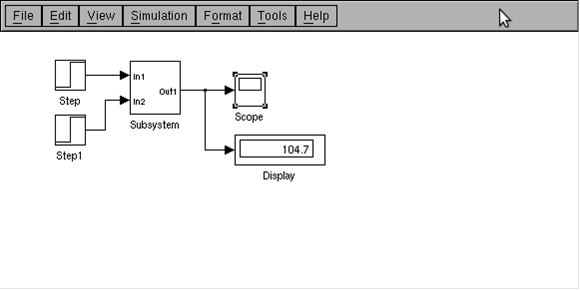
Заменяем эту модель на один блок Subsystem.На вход Subsystem подаем номинальное напряжение якоря с помощью блока Step и с помощью блока Step 1 подаем вращающий момент, а на выходе подключаем блок Scope.
Самое читаемое:
Разработка передающего устройства системы беспроводного удаленного доступа
Передача информации в пространстве с помощью радиоволн осуществлялась со
времени изобретения радио в конце девятнадцатого века. В настоящее время
интерес к радиосвязи возрос в связи с тенденцией отказа от проводов. Появился
модный термин «беспроводная связь» (wireless), что является синонимом
«радиосвязи».
Передают обычно речь, м ...