Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Последетекторное обнаружение
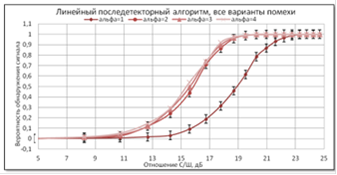
Рисунок 18 - Рабочая характеристика линейного алгоритма, последетекторный прием
Таблица 6. Результаты моделирования линейного алгоритма
|
Линейный алгоритм | ||||
|
h, дБ |
α=1 |
α=2 |
α=3 |
α=4 |
|
4,70 |
0,003 |
0,001 |
0 |
0,003 |
|
8,22 |
0,003 |
0,016 |
0,014 |
0,016 |
|
10,72 |
0,008 |
0,028 |
0,037 |
0,052 |
|
12,66 |
0,018 |
0,121 |
0,119 |
0,145 |
|
14,24 |
0,032 |
0,244 |
0,284 |
0,292 |
|
15,58 |
0,092 |
0,441 |
0,492 |
0,539 |
|
16,74 |
0,189 |
0,711 |
0,738 |
0,736 |
|
17,76 |
0,314 |
0,866 |
0,897 |
0,92 |
|
18,68 |
0,459 |
0,958 |
0,967 |
0,972 |
|
19,51 |
0,615 |
0,988 |
0,99 |
0,99 |
|
20,26 |
0,785 |
0,998 |
0,999 |
1 |
|
20,96 |
0,868 |
0,999 |
0,999 |
1 |
|
21,60 |
0,932 |
1 |
1 |
1 |
|
22, 20 |
0,966 |
1 |
1 |
1 |
|
22,76 |
0,988 |
1 |
1 |
1 |
|
23,29 |
0,997 |
1 |
1 |
1 |
|
23,78 |
1 |
1 |
1 |
1 |
|
24,25 |
0,999 |
1 |
1 |
1 |
|
24,70 |
1 |
1 |
1 |
1 |
Самое читаемое:
Следящий электропривод
Автоматизация процессов управления различными
объектами связана с широким использованием следящих приводов. Следящие приводы
нашли применение во многих областях техники: в системах управления станками, в
системах управления манипуляторами, в моделирующих стендах, в системах
управления объектами вооружения и т. д.
Следящий электро ...