Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Индуктивные преобразователи
Индуктивный преобразователь представляет собой катушку индуктивности (дроссель), полное сопротивление которой изменяется при взаимном относительном перемещении элементов магнитопровода. Имеются две группы преобразователей: c изменяющейся индуктивностью и с изменяющимся активным сопротивлением.
Пример схемы преобразователя первой группы показан на рисунке 4, а. Преобразователь состоит из П-образного магнитопровода 1, на котором размещена катушка 2, и подвижного якоря 3. При перемещении якоря изменяется длина воздушного зазора и, следовательно, магнитное сопротивление, что вызывает изменение индуктивности дросселя.
Другая широко используемая модификация (плунжерный преобразователь) показана на рисунке 4, б. Преобразователь представляет собой катушку, из которой может выдвигаться ферромагнитный сердечник (плунжер). При среднем положении плунжера индуктивность максимальна [10].
Схема преобразователя второй группы приведена на рисунке 4, в. В зазор магнитной цепи 1 вводится пластинка 2 с высокой электропроводностью, в которой наводятся вихревые токи, приводящие к увеличению потерь активной мощности катушки 3. Это эквивалентно увеличению ее активного сопротивления.
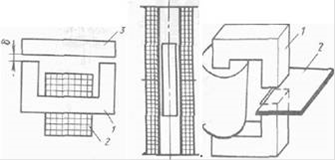
a) б) в)
Условные обозначения:
преобразователь с изменяющейся индуктивностью;
плунжерный преобразователь с изменяющейся индуктивностью;
преобразователь с изменяющимся активным сопротивлением.
Рисунок 4 - Схемы различных типов индуктивных преобразователей
Функция преобразования преобразователя (рисунок 4, (а)) с некоторыми допущениями может быть получена следующим образом.
Индуктивность катушки:
L = vФ / I, (23)
где v - число витков;
Ф - пронизывающий ее магнитный поток;
I - проходящий по катушке ток.
Ток связан с МДС Hl соотношением:
I = Hl / v. (24)
Подставляя формулу (18) в (19), получаем:
L = v2Ф / Hl = v2 / RМ , (25)
где RМ - магнитное сопротивление преобразователя:
RМ = Hl / Ф. (26)
Если пренебречь рассеянием магнитного потока и нелинейностью кривой намагничивания стали, то магнитное сопротивление:
RМ = RСТ + RЗ = lСТ / mrm0 QСТ + 2d / m0Q , (27)
где RСТ - магнитное сопротивление стальных участков магнитопровода, Ом;
l СТ - длина средней силовой линии по стальным участкам, м;
QСТ - их поперечное сечение, м2;
mr - магнитная проницаемость стали, Гн/м;
m0 = 4p·10-7 Гн/м магнитная постоянная, Гн/м;
RЗ - магнитное сопротивление магнитных зазоров, имеющих длину d и сечение Q.
Будем считать QСТ = Q. При этом индуктивность преобразователя:
L = m0Qv2 / (2d + lСТ / mr). (28)
Если пренебречь активным сопротивлением дросселя, то функция преобразователя, т.е. зависимость электрического сопротивления Z от размера воздушного зазора d, выражается зависимостью:
Z(d) = jwL = jwv2m0Q / (2d + lСТ / mr) » jwv2m0Q / 2d. (29)
В последнем равенстве имеется в виду, что 2d » lСТ / mr вследствие большого значения магнитной проницаемости магнитопровода.
Под чувствительностью индуктивного преобразователя понимают:
K ≈ ∆Z/∆d. (30)
Индуктивный преобразователь является электромагнитом, его сила притяжения, возрастающая с увеличением чувствительности, нелинейно зависит от перемещения якоря и может явиться причиной погрешности преобразователя, предшествующего индуктивному.
Сила притяжения описывается следующим выражением:
 , (31)
, (31)
где Wм - энергия магнитного поля;
L - индуктивность преобразователя, Гн;
I - ток, проходящий через обмотку преобразователя, А.
Описанные одинарные индуктивные преобразователи имеют ряд недостатков:
Самое читаемое:
Диагностика и ремонт СВ-передатчика
Провести
ремонт радиоэлектронного изделия, значит восстановить его работоспособность.
Чтобы провести ремонт необходимо определить является ли изделие
ремонтопригодным. При ремонте узлы изделия могут быть заменены полностью или
частично. После проведения замены элементов в ремонтируемом изделии необходимо
провести регулировки и наст ...