Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Индуктивные преобразователи
1) их функции преобразования нелинейны;
2) аддитивные погрешности, в частности погрешность реального преобразователя, вызванная температурным изменением активного сопротивления обмотки, велики;
3) сила притяжения якоря значительна.
Реализовать преобразователи первой группы, т.е. те, у которых меняется индуктивность можно различными способами. Например, можно менять длину δ, сечение воздушного участка магнитопровода s, потери в магнитопроводе и др. [2].
На рисунке 5 схематически показаны некоторые типы индуктивных преобразователей.
Индуктивный преобразователь (рисунок 5 (а)) с переменной длиной воздушного зазора δ характеризуется нелинейной зависимостью L = f(δ). Такой преобразователь обычно применяется при перемещениях якоря на расстояние 0,01 - 5 мм. Значительно меньшей чувствительностью, но линейной зависимостью L = f(s) отличаются преобразователи с переменным сечением воздушного зазора (рисунок 5 б). Эти преобразователи используются при перемещениях якоря до 10 - 15 мм.
Если ферромагнитный сердечник преобразователя подвергать механическому воздействию F, то вследствие изменения магнитной проницаемости материала сердечника μ изменится магнитное сопротивление цепи, что повлечет за собой изменение индуктивности L и взаимной индуктивности M обмоток. На этом принципе основаны магнитоупругие преобразователи (рисунок 5 в).
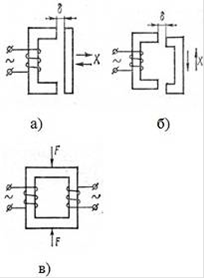
Условные обозначения:
а - с изменяющейся длинной зазора;
б - с изменяющимся сечение зазора;
в - магнитоупругий.
Рисунок 5 - Индуктивные преобразователи
Широко распространены индуктивные дифференциальные преобразователи (рисунок 6), в которых под воздействием измеряемой величины одновременно и притом с разными знаками изменяются два зазора двух электромагнитов. Благодаря этому уменьшается аддитивная погрешность, улучшается линейность функции преобразования, в 2 раза возрастает чувствительность и уменьшается сила притяжения якоря [3].
Дифференциальные преобразователи в сочетании с соответствующей схемой (обычно мостовой) имеют более высокую чувствительность, чем обычные преобразователи, дают возможность уменьшить нелинейность функции преобразования, испытывают меньшее влияние внешних факторов. В этих преобразователях результирующее усилие на якорь со стороны электромагнитов меньше, чем в недифференциальных.
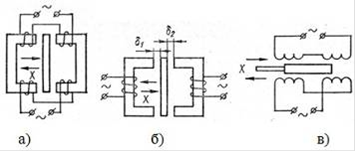
Условные обозначения:
а - дифференциальный трансформаторный;
б - дифференциальный;
в - дифференциальный трансформаторный, с разомкнутой магнитной цепью.
Рисунок 6 - Дифференциальные индуктивные преобразователи
Применяются также индуктивные дифференциальные преобразователи трансформаторного типа (рисунок 6 а), в которых две секции первичной обмотки включены согласно, а две секции вторичной обмотки - встречно. При питании первичной обмотки переменным током и при симметричном положении якоря относительно электромагнитов ЭДС на выходных зажимах равна нулю. При перемещении якоря возникает сигнал на выходных зажимах.
Для преобразования сравнительно больших перемещений (до 50-100 мм.) применяются индуктивные преобразователи с незамкнутой магнитной цепью. На рисунке 6, в схематически показано устройство дифференциального трансформаторного индуктивного преобразователя с незамкнутой магнитной цепью, используемого для передачи показаний различных неэлектрических приборов (манометров, дифференциальных манометров).
Конструкция преобразователя определяется главным образом значением измеряемого перемещения. Габариты преобразователя выбирают, исходя из необходимой мощности выходного сигнала и других технических требований.
Самое читаемое:
Характеристики нанотолщинных композиционных слоистых покрытий на гибких подложках после деформации
Жидкокристаллические
индикаторы широко используют в оптических устройствах отображения информации, в
частности, как составную часть жидкокристаллических дисплеев. В зависимости от
материала подложек различают жесткие (стеклянные подложки) и гибкие
(пластиковые подложки) индикаторы. Преимущества гибких индикаторов в
компактности, пр ...