Разделы сайта
- Главная
- Исследования и анализ современных технологий
- IP-телефония
- Антенно-фидерные устройства
- Виртуальное построение рабочей локальной сети
- Влияние электромагнитного поля на подземную проволочную антенну
- Микрополосковая антенная решетка
- Система экологического мониторинга вредных газовых выбросов
- Организация процесса производства цифрового телевиденья
Оптимизация параметров клистронного резонатора, работающего на высших видах колебания
Расчетная часть
Находим высоту резонатора
h = 0.15·λ , (5)
λ = ![]() , (6)
, (6)
= 0.15·111,1 = 16,6 (мм) .
. Находим диаметр и радиус резонатора
λ = 1,307D , (7)
D = ![]() (мм),
(мм),
r = D/2 = 42,5 (мм).
Строим в программе AZIMUT контур резонатора и вычисляем его характеристики для 3 видов колебаний E010, E020 и E030
Первый вид колебаний
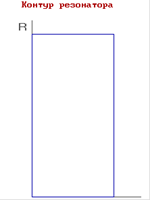
Рис.4. Контур резонатора, работающего на E010 - виде колебаний, при частоте 2700МГц.

Рис. 5. Расчет собственной частоты для первого вида колебаний при полученных размерах резонатора.
Находим погрешность частоты:
∆F = (![]() )·100 =
)·100 = ![]() , (8)
, (8)
Получаем распределение полей в резонаторе:

Рис.6. Карта силовых линий электрического поля.
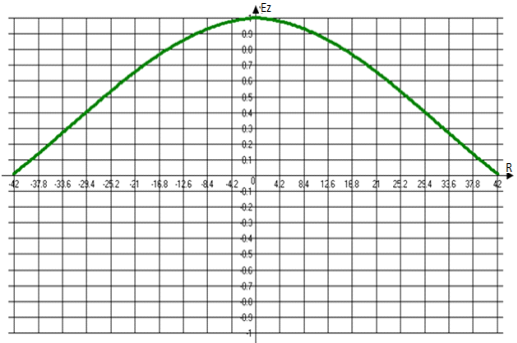
Рис.7. Вид колебаний E010 в резонаторе.
![]()
![]()
Второй вид колебаний
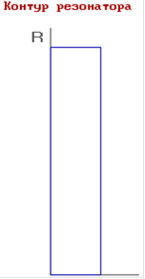
Рис.8. Контур резонатора, работающего на E020 - виде колебаний, при частоте 2700МГц.
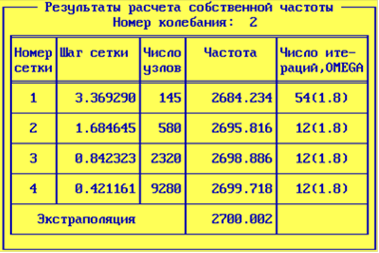
Рис. 9. Расчет собственной частоты для второго вида колебаний при полученных размерах резонатора.
Находим погрешность частоты:
∆F = (![]() )·100 =
)·100 = ![]() .
.
Получаем распределение полей в резонаторе:
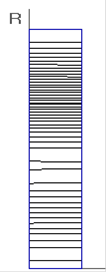
Рис.10. Карта силовых линий электрического поля.
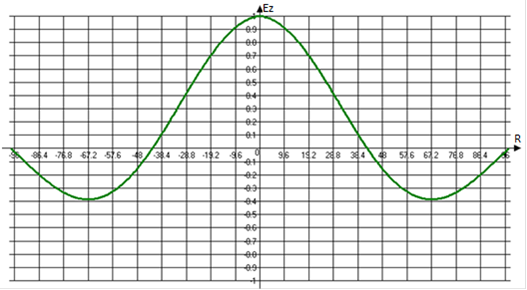
Рис.11. Вид колебаний E020 в резонаторе.
Рассчитываем экстремумы функции:
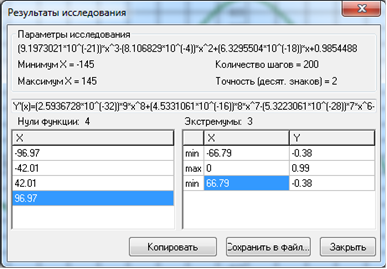
Рис.12. Результаты аппроксимации.
Исследование функции: Y(x)=(2.5936728*10^(-32))*x^9+(4.5331061*10^(-16))*x^8-(5.3223061*10^(-28))*x^7-(1.3952141*10^(-11))*x^6+(3.6347619*10^(-24))*x^5+(1.6618138*10^(-7))*x^4-(9.1973021*10^(-21))*x^3-(8.106829*10^(-4))*x^2+(6.3295504*10^(-18))*x+0.9854488.
Нули функции: 4 Экстремумы: 3
X Y
,97 min -66,79 -0.38
,01 max 0 0.99
,01 min 66,79 -0.38
,97
Определяем характеристическое сопротивление в экстремумах функции
![]()
Определяем добротность резонатора:
![]()
Третий вид колебаний
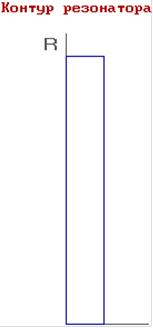
Рис.13. Контур резонатора, работающего на E030 - виде колебаний, при частоте 2700МГц.
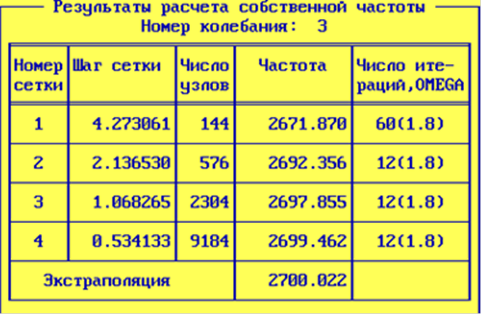
Рис. 14. Расчет собственной частоты для второго вида колебаний при полученных размерах резонатора.
Находим погрешность частоты:
∆F = (![]() )·100 =
)·100 = ![]() .
.
Получаем распределение полей в резонаторе:
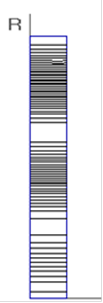
Рис.15. Карта силовых линий электрического поля.
Самое читаемое:
Разработка методики монтажа и эксплуатации вычислителя тепла
расход тепло монтаж теплосчетчик
Автоматизация производства представляет собой процесс
передачи функции контроля и управления производством от человека автоматическим
устройством.
При создании автоматизированных систем следует
принимать во внимание уровень технологии и оборудования, состояние организации
и управления производством ...